S曲线轨迹规划方法原理解析(附Python代码)
飞行轨迹规划与调整方法 #生活技巧# #数码产品使用技巧# #无人机飞行教学#
目录
1. 引言
2.1 输入和输出
2.2 分段规划
2.3 实际求解
2.3.1 速度能够到最大(存在匀速阶段)
2.3.2 速度达不到最大(不存在匀速阶段)
3.代码实现
4. 参考文章
1. 引言
S曲线轨迹规划方法通过平滑的控制速度和加速度的变化,确保机器人在规划起点与目标点之间的平稳过渡,减少运动冲击,提高运动和控制精度。S曲线轨迹一般分为加加速(T1)、匀加速(T2)、减加速(T3)、匀速(T4)、加减速(T5)、匀减速(T6)、减减速(T7)七个阶段,又称为七段式S曲线,如图所示:
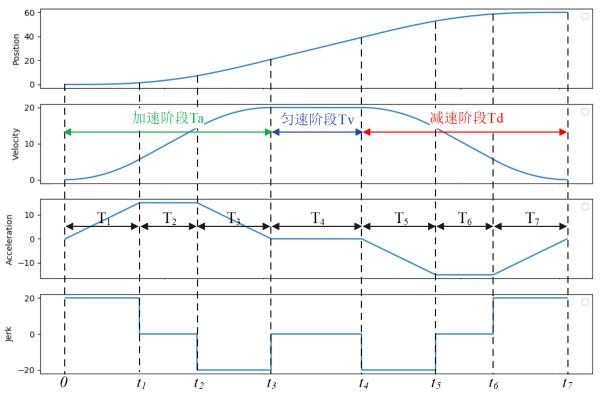
其中,图中 T1~T6 分别表示各运动阶段的持续时间,t1~t6 表示各运动阶段的过渡时刻,Ta表示加速运动持续时间,Tv表示匀速运动持续时间,Td表示减速运动持续时间。
2. 规划原理
2.1 输入和输出
七段式S曲线轨迹规划方法的输入和输出分别为:
输入:1.初始状态:初始位置 x0" role="presentation">x0、初始速度 v0" role="presentation">v0 ;
2.目标状态:目标位置 xg" role="presentation">xg、目标速度 vg" role="presentation">vg ;
3.运动限制:最大速度 vmax" role="presentation">vmax、最大加速度 amax" role="presentation">amax、最大加加速度(jerk) jmax" role="presentation">jmax ;
4.运动位移:s=xg−x0" role="presentation">s=xg−x0 ;
输出:位置轨迹 x(t)" role="presentation">x(t)、速度轨迹 v(t)" role="presentation">v(t)、加速度轨迹 a(t)" role="presentation">a(t) ,输出结果表示为一系列控制信号随时间 t 变化的函数。
2.2 分段规划
· 加加速度段T1(0<t≤t1" role="presentation">0<t≤t1): 加速度 a=0" role="presentation">a=0 以 j=jmax" role="presentation">j=jmax 线性增加至 a=amax" role="presentation">a=amax
a(t)=jmaxt" role="presentation">a(t)=jmaxt
v(t)=v0+12jmaxt2" role="presentation">v(t)=v0+12jmaxt2
x(t)=x0+16jmaxt3" role="presentation">x(t)=x0+16jmaxt3
· 匀加速度段T2(t1<t≤t2" role="presentation">t1<t≤t2): 加速度恒定,速度v=v(t1)" role="presentation">v=v(t1) 以 a=amax" role="presentation">a=amax 线性增加
a(t)=amax" role="presentation">a(t)=amax
v(t)=v(t1)+amax(t−t1)" role="presentation">v(t)=v(t1)+amax(t−t1)
x(t)=x(t1)+v(t1)(t−t1)+12amax(t−t1)2" role="presentation">x(t)=x(t1)+v(t1)(t−t1)+12amax(t−t1)2
· 减加速度段T3(t2<t⩽t3" role="presentation">t2<t⩽t3): 加速度 a=amax" role="presentation">a=amax 以 j=−jmax" role="presentation">j=−jmax 线性减小至0,速度增加至v=vmax" role="presentation">v=vmax
a(t)=amax−jmax(t−t2)" role="presentation">a(t)=amax−jmax(t−t2)
v(t)=vt2+amax(t−t2)−12jmax(t−t2)2" role="presentation">v(t)=vt2+amax(t−t2)−12jmax(t−t2)2
x(t)=x(t2)+v(t2)(t−t2)+12amax(t−t2)2−16jmax(t−t2)3" role="presentation">x(t)=x(t2)+v(t2)(t−t2)+12amax(t−t2)2−16jmax(t−t2)3
· 匀速段T4(t3<t⩽t4" role="presentation">t3<t⩽t4): 加速度 a=0" role="presentation">a=0, j=0" role="presentation">j=0, v=vmax" role="presentation">v=vmax
a(t)=0" role="presentation">a(t)=0
v(t)=v(t3)=vmax" role="presentation">v(t)=v(t3)=vmax
x(t)=x(t3)+vmax(t−t3)" role="presentation">x(t)=x(t3)+vmax(t−t3)
· 加减速段T5(t4<t⩽t5" role="presentation">t4<t⩽t5): 加速度以j=−jmax" role="presentation">j=−jmax 从0减少至a=−amax" role="presentation">a=−amax
a(t)=−jmax(t−t4)" role="presentation">a(t)=−jmax(t−t4)
v(t)=vmax−12jmax(t−t4)2" role="presentation">v(t)=vmax−12jmax(t−t4)2
x(t)=x(t4)+vmax(t−t4)−16jmax(t−t4)3" role="presentation">x(t)=x(t4)+vmax(t−t4)−16jmax(t−t4)3
· 匀减速段T6(t5<t⩽t6" role="presentation">t5<t⩽t6): 加速度 a=−amax" role="presentation">a=−amax, j=0" role="presentation">j=0
a(t)=−amax" role="presentation">a(t)=−amax
v(t)=v(t5)−amax(t−t5)" role="presentation">v(t)=v(t5)−amax(t−t5)
x(t)=x(t5)+v(t5)(t−t5)−12amax(t−t5)2" role="presentation">x(t)=x(t5)+v(t5)(t−t5)−12amax(t−t5)2
· 减减速段T7(t6<t⩽t7" role="presentation">t6<t⩽t7): 加速度以j=jmax" role="presentation">j=jmax 从 a=−amax" role="presentation">a=−amax 增加至 a=0" role="presentation">a=0
a(t)=−amax+jmax(t−t6)" role="presentation">a(t)=−amax+jmax(t−t6)
v(t)=v(t6)−12jmax(t−t6)2−amax(t−t6)" role="presentation">v(t)=v(t6)−12jmax(t−t6)2−amax(t−t6)
x(t)=x(t6)+v(t6)(t−t6)−12amax(t−t6)2−16jmax(t−t6)3" role="presentation">x(t)=x(t6)+v(t6)(t−t6)−12amax(t−t6)2−16jmax(t−t6)3
2.3 实际求解
在实际工程应用过程中,由于初速度、末速度、实际路径长度等限制,不能保证每次规划都存在上述完整的七段过程。所以又可以把 S 曲线的七段过程分为加速过程、匀速过程、减速过程三个阶段,这三个阶段的持续时间分别用Ta" role="presentation">Ta、Tv" role="presentation">Tv、Tj" role="presentation">Tj 表示。
2.3.1 速度能够到最大(存在匀速阶段)(1)判断加速段能否达到最大加速度
首先判断加速阶段是否能够达到最大加速度amax" role="presentation">amax,其中,存在关系式:
v1=v0+12jmaxT12" role="presentation">v1=v0+12jmaxT12,amax=jmaxT1" role="presentation">amax=jmaxT1
由于加加速阶段(T1" role="presentation">T1)与减加速阶段(T3" role="presentation">T3)是对称的(即加速度 a" role="presentation">a 以 j=±jmax" role="presentation">j=±jmax 增加/减少到 a=amax" role="presentation">a=amax/a=0" role="presentation">a=0 的过程中时间相等,表示为Tj1" role="presentation">Tj1,速度增量相等),在临界情况(刚好没有匀加速阶段T2" role="presentation">T2,加速度a" role="presentation">a达到amax" role="presentation">amax后马上减少)下,可以推导出:
v1−v0=amax22jmax" role="presentation">v1−v0=amax22jmax
vmax−v0=2(v1−v0)=amax2jmax" role="presentation">vmax−v0=2(v1−v0)=amax2jmax
vmax=v1+12jmaxTj12=v0+jmaxTj12" role="presentation">vmax=v1+12jmaxTj12=v0+jmaxTj12
则当(vmax−v0)jmax<amax2" role="presentation">(vmax−v0)jmax<amax2时,不能达到最大加速度amax" role="presentation">amax,也没有匀加速阶段,此时有关系式:
Tj1=vmax−v0jmax" role="presentation">Tj1=vmax−v0jmax
Ta=2Tj1" role="presentation">Ta=2Tj1
此时,系统最大加速度为alim=jmaxTj1" role="presentation">alim=jmaxTj1 。
当(vmax−v0)jmax>amax2" role="presentation">(vmax−v0)jmax>amax2时,能达到最大加速度amax" role="presentation">amax,存在匀加速阶段(T2" role="presentation">T2),此时有关系式:
Tj1=amaxjmax" role="presentation">Tj1=amaxjmax
vmax−v0=12jmaxTj12+amaxT2+12jmaxTj12=jmaxTj12+amaxT2" role="presentation">vmax−v0=12jmaxTj12+amaxT2+12jmaxTj12=jmaxTj12+amaxT2
Ta=2Tj1+T2" role="presentation">Ta=2Tj1+T2
进一步得到:
T2=vmax−v0a−Tj1" role="presentation">T2=vmax−v0a−Tj1
Ta=Tj1+vmax−v0amax" role="presentation">Ta=Tj1+vmax−v0amax
(2)判断减速段能否达到最大减速度
同理,减减速阶段(T7" role="presentation">T7)与加减速阶段(T5" role="presentation">T5)是对称的(即加速度 a" role="presentation">a 以 j=±jmax" role="presentation">j=±jmax 增加/减少到 a=amax" role="presentation">a=amax/a=0" role="presentation">a=0 的过程中时间相等,表示为Tj2" role="presentation">Tj2,速度增量相等),临界情况为刚好没有匀减速阶段T6" role="presentation">T6。
同理,当 (vmax−vg)jmax<amax2" role="presentation">(vmax−vg)jmax<amax2 时,达不到最大减速度 a=−amax" role="presentation">a=−amax,存在:
Tj2=vmax−vgjmax" role="presentation">Tj2=vmax−vgjmax
Td=2Tj2" role="presentation">Td=2Tj2
当 (vmax−vg)jmax>amax2" role="presentation">(vmax−vg)jmax>amax2 时,可以达到最大减速度 a=−amax" role="presentation">a=−amax,存在:
Tj2=amaxjmax" role="presentation">Tj2=amaxjmax
Td=Tj2+vmax−vgamax" role="presentation">Td=Tj2+vmax−vgamax
(3) 计算匀速阶段时间
由于加速阶段中加速过程的对称性,加速阶段平均速度可以表示为v0+vmax2" role="presentation">v0+vmax2,同理减速阶段平均速度为vmax+vg2" role="presentation">vmax+vg2,则可以求出匀速阶段持续时间Tv" role="presentation">Tv:
v0+vmax2Ta+vmaxTv+vmax+vg2Td=s" role="presentation">v0+vmax2Ta+vmaxTv+vmax+vg2Td=s
Tv=svmax−Ta2(1+v0vmax)−Td2(1+vgvmax)" role="presentation">Tv=svmax−Ta2(1+v0vmax)−Td2(1+vgvmax)
如果Tv>0" role="presentation">Tv>0,则存在匀速阶段,可以按照上述各阶段公式,求出七个阶段各段的位置、速度、加速度函数。如果Tv<0" role="presentation">Tv<0,则不存在匀速阶段,系统达不到最大速度vmax" role="presentation">vmax。
2.3.2 速度达不到最大(不存在匀速阶段)Tv<0" role="presentation">Tv<0,不存在匀速阶段,系统达不到最大速度vmax" role="presentation">vmax。存在:
Tj1=Tj2=amaxjmax" role="presentation">Tj1=Tj2=amaxjmax
Ta=amax2jmax−2v0+Δ2amax" role="presentation">Ta=amax2jmax−2v0+Δ2amax
Td=amax2jmax−2vg+Δ2amax" role="presentation">Td=amax2jmax−2vg+Δ2amax
Δ=amax4j2+2(v02+vg2)+amax(4s−2(v0+vg)amaxjmax)" role="presentation">Δ=amax4j2+2(v02+vg2)+amax(4s−2(v0+vg)amaxjmax)
其中,Δ" role="presentation">Δ推导参考【4】,此时,关于系统能否达到最大加速度a=±amax" role="presentation">a=±amax,需要讨论Ta" role="presentation">Ta与2Tj1" role="presentation">2Tj1,Td" role="presentation">Td与2Tj2" role="presentation">2Tj2大小关系。
当 Ta≥2Tj1" role="presentation">Ta≥2Tj1 且 Td≥2Tj2" role="presentation">Td≥2Tj2 时,系统不能达到最大速度vmax" role="presentation">vmax,但可以达到最大加速度,存在:
vmax′=v0+amax(Ta−Tj1)" role="presentation">vmax′=v0+amax(Ta−Tj1)
当 Ta<2Tj1" role="presentation">Ta<2Tj1 且 Td<2Tj2" role="presentation">Td<2Tj2 时,系统不能达到最大速度vmax" role="presentation">vmax,也达不到最大加速度,此时需逐渐减少设定的最大加速度amax" role="presentation">amax,直至满足 Ta≥2Tj1" role="presentation">Ta≥2Tj1 且 Td≥2Tj2" role="presentation">Td≥2Tj2 为止。
3.代码实现
import numpy as np
import matplotlib.pyplot as plt
x_0 = 0
x_g = 60
v_max = 20
v_0 = 0
v_g = 0
a_max = 15
j_max = 20
count = 0
if (v_max - v_0) * j_max < a_max ** 2:
if v_0 > v_max:
Tj1 = 0
Ta = 0
alima = 0
else:
Tj1 = np.sqrt((v_max - v_0) / j_max)
Ta = 2 * Tj1
alima = Tj1 * j_max
else:
Tj1 = a_max / j_max
Ta = Tj1 + (v_max - v_0) / a_max
alima = a_max
if (v_max - v_g) * j_max < a_max ** 2:
Tj2 = np.sqrt((v_max - v_g) / j_max)
Td = 2 * Tj1
alimd = Tj2 * j_max
else:
Tj2 = a_max / j_max
Td = Tj2 + (v_max - v_g) / a_max
alimd = a_max
Tv = (x_g - x_0) / v_max - Ta / 2 * (1 + v_0 / v_max) - Td / 2 * (1 + v_g / v_max)
T = Tv + Ta + Td
p = []
vc = []
ac = []
jc = []
if Tv > 0:
vlim = v_max
T = Tv + Ta + Td
else:
Tv = 0
amax_org = a_max
delta = (a_max ** 4) / (j_max ** 2) + 2 * (v_0 ** 2 + v_g ** 2) + a_max * (4 * (x_g - x_0) - 2 * a_max / j_max * (v_0 + v_g))
Tj1 = a_max / j_max
Ta = (a_max ** 2 / j_max - 2 * v_0 + np.sqrt(delta)) / (2 * a_max)
Tj2 = a_max / j_max
Td = (a_max ** 2 / j_max - 2 * v_g + np.sqrt(delta)) / (2 * a_max)
vlim = v_0 + (Ta - Tj1) * alima
while Ta < 2 * Tj1 or Td < 2 * Tj2:
count += 1
a_max -= amax_org * 0.1
alima = a_max
alimd = a_max
if a_max > 0:
delta = (a_max ** 4) / (j_max ** 2) + 2 * (v_0 ** 2 + v_g ** 2) + a_max * (4 * (x_g - x_0) - 2 * a_max / j_max * (v_0 + v_g))
else:
delta = (a_max ** 4) / (j_max ** 2) + 2 * (v_0 ** 2 + v_g ** 2) - a_max * (4 * (x_g - x_0) - 2 * a_max / j_max * (v_0 + v_g))
Tj1 = a_max / j_max
Ta = (a_max ** 2 / j_max - 2 * v_0 + np.sqrt(delta)) / (2 * a_max)
Tj2 = a_max / j_max
Td = (a_max ** 2 / j_max - 2 * v_g + np.sqrt(delta)) / (2 * a_max)
vlim = v_0 + (Ta - Tj1) * alima
vlima = vlim
vlimb = v_g - (Td - Tj2) * alimd
print("调整后信息:")
print("TJ1:",Tj1)
print("Ta:",Ta)
print("Td",Td)
print("a_max:",a_max)
if Ta < 0 or Td < 0:
if v_0 > v_g:
Ta = 0
Tj1 = 0
alima = 0
Td = 2 * (x_g - x_0) / (v_g + v_0)
Tj2 = (j_max * (x_g - x_0) - np.sqrt(j_max * (j_max * (x_g - x_0) ** 2 + (v_g + v_0) ** 2 * (v_g - v_0)))) / (j_max * (v_g + v_0))
alimd = -j_max * Tj2
vlim = v_g - (Td - Tj2) * alimd
alimd = -alimd
else:
Td = 0
Tj2 = 0
Ta = 2 * (x_g - x_0) / (v_g + v_0)
Tj1 = (j_max * (x_g - x_0) - np.sqrt(j_max * (j_max * (x_g - x_0) ** 2 - (v_g + v_0) ** 2 * (v_g - v_0)))) / (j_max * (v_g + v_0))
alima = j_max * Tj1
vlim = v_0 + (Ta - Tj1) * alima
print(Tj1)
print(Tj2)
print(Ta)
print(Td)
print("565")
print(alima)
print(alimd)
T = Tv + Ta + Td
for t in np.arange(0, T, 0.001):
if 0 <= t < Tj1:
x = x_0 + v_0 * t + j_max * t ** 3 / 6
p.append(x)
v = v_0 + j_max * t ** 2 / 2
vc.append(v)
a = j_max * t
ac.append(a)
jc.append(j_max)
elif Tj1 <= t < (Ta - Tj1):
x = x_0 + v_0 * t + alima / 6 * (3 * t ** 2 - 3 * Tj1 * t + Tj1 ** 2)
p.append(x)
v = v_0 + alima * (t - Tj1 / 2)
vc.append(v)
a = alima
ac.append(a)
jc.append(0)
elif (Ta - Tj1) <= t < Ta:
x = x_0 + (vlim + v_0) * Ta / 2 - vlim * (Ta - t) + j_max * (Ta - t) ** 3 / 6
p.append(x)
v = vlim - j_max * (Ta - t) ** 2 / 2
vc.append(v)
a = j_max * (Ta - t)
ac.append(a)
jc.append(-j_max)
elif Ta <= t < (Ta + Tv):
x = x_0 + (vlim + v_0) * Ta / 2 + vlim * (t - Ta)
p.append(x)
v = vlim
vc.append(v)
a = 0
ac.append(0)
jc.append(0)
elif (T - Td) <= t < (T - Td + Tj2):
x = x_g - (vlim + v_g) * Td / 2 + vlim * (t - T + Td) - j_max * (t - T + Td) ** 3 / 6
p.append(x)
v = vlim - j_max * (t - T + Td) ** 2 / 2
vc.append(v)
a = -j_max * (t - T + Td)
ac.append(a)
jc.append(-j_max)
elif (T - Td + Tj2) <= t < (T - Tj2):
x = x_g - (vlim + v_g) * Td / 2 + vlim * (t - T + Td) - alimd / 6 * (3 * (t - T + Td) ** 2 - 3 * Tj2 * (t - T + Td) + Tj2 ** 2)
p.append(x)
v = vlim - alimd * (t - T + Td - Tj2 / 2)
vc.append(v)
a = -alimd
ac.append(a)
jc.append(0)
elif (T - Tj2) <= t < T:
x = x_g - v_g * (T - t) - j_max * (T - t) ** 3 / 6
p.append(x)
v = v_g + j_max * (T - t) ** 2 / 2
vc.append(v)
a = -j_max * (T - t)
ac.append(a)
jc.append(j_max)
t = np.arange(0, T, 0.001)
plt.figure(figsize=(12, 8))
plt.subplot(4, 1, 1)
plt.plot(t, p)
plt.ylabel('Position')
plt.legend()
plt.subplot(4, 1, 2)
plt.plot(t, vc)
plt.ylabel('Velocity')
plt.legend()
plt.subplot(4, 1, 3)
plt.plot(t, ac)
plt.ylabel('Acceleration')
plt.xlabel('Time')
plt.legend()
plt.subplot(4, 1, 4)
plt.plot(t, jc)
plt.ylabel('Jerk')
plt.xlabel('Time')
plt.legend()
plt.show()
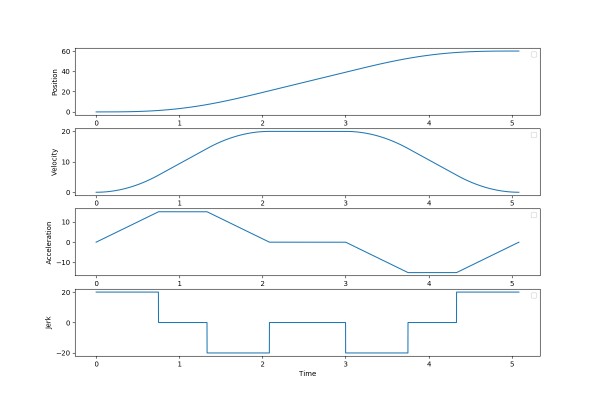
运行结果:
4. 参考文章
[1]一文教你快速搞懂速度曲线规划之S形曲线(超详细+图文+推导+附件代码)_s型速度曲线-CSDN博客
[2]【机器人学】5-2.六自由度机器人轨迹规划-速度规划- S型曲线【附MATLAB代码】_scurve速度规划 matlab代码-CSDN博客
[3]分段式S形速度规划算法_s型加减速曲线 不存在匀加速-CSDN博客
[4]田军锋,林浒,姚壮,等.数控系统S型曲线加减速快速规划研究[J].小型微型计算机系统,2013,34(01):168-172.
网址:S曲线轨迹规划方法原理解析(附Python代码) https://www.yuejiaxmz.com/news/view/182606
相关内容
6个 Python 办公黑科技,工作效率提升100倍!(附代码)【Python报错已解决】TypeError: unsupported operand type (s) for +: ‘int‘ and‘str‘
python爬虫代码
Python 循环讲解/从while到for循环(以求解S=1+2+3+……+n为例)
某动点作曲线运动,当动点运动到轨迹的M点处时,速度v=10m/s,切向加速度aτ=3.8m/s2,而该瞬时动点加速度在直角
【数学建模】线性规划模型基本原理与案例分享
大数据为智能家居提供智能家电管理解决方案
Python学习(一)
python+flask计算机毕业设计家庭财务管理系统APP(程序+开题+论文)
设备使用python连接阿里Iot
随便看看
最新动态分享
- 家庭消毒不用愁!5大物理消毒法守护健康生活
- カビをアルコール退治|消毒用エタノールでの除菌方法やNG使用法も
- 消毒产品目录
- 基于STM32的智能鞋柜控制系统设计与实现
- 【解決】家具に生えたカビの取り方、予防法、原因を紹介
- 抗菌实验不同操作方法及细节对试验结果的影响
- 多部门推动物联网创新发展 到2028年这些技术要突破
- 生活区节水节电节能管控措施.docx
- 家庭节约用电有哪些具体方法?
- 北京市出台碳普惠管理办法 市民低碳行为将能“变现”
热点动态分享
- 145095
- 52201
- 45097
- 42473
- 40907
- 30882
- 25663
- 25527
- 21903
- 18601

