基于语音控制及脑控的智慧康养辅助机器人设计
如何用语音助手控制扫地机器人 #生活技巧# #数码产品使用技巧# #智能家居控制#
基于语音控制及脑控的智慧康养辅助机器人设计
Design of Intelligent Health Assistant Robot Based on Voice Control and Brain Control
1. 引言
近年来兴起的智慧养老,将现代科技与养老服务相结合,其致力于全面提高养老服务的体验与效率。对于中国来说,“护理员严重短缺 + 人均GDP突破1万美元 + 政策规划”将成为驱动国内养老机器人行业发展的三大要素。智慧健康养老的兴起,将“养老”、“康养”等传统问题与智能发展紧密连接,与此同时,科技医疗的日益成熟,也使人工智能逐步从云端走向物联网终端,养老辅助机器人等智能产品进入人们的视野。婴儿潮与老龄化的激增给养老市场带来巨大的成长空间,但由于传统养老模式无法全面适应当前的养老需求,养老机器人便能较好的填补这一空缺,迎来了新一轮的发展风口。
经过市场调研,市面上存在的养老机器人存在:意识不到位、价格障碍、技术不成熟等问题。其价格问题在中低民众对于选择养老产品时显得更加突出,并且由于技术不成熟等原因,对其养老产品持有怀疑态度。但本次设计的智慧养老辅助机器人系统能够为那些行动不便的老人及残疾人提供更加周全的生活服务和心理疏导需求 [1]。
本设计主要由基于稳态视觉诱发电位的脑机接口系统、语音识别系统和机器人控制系统组成。对于老年人的需求,该系统可准确地获取,其技术更加成熟、机器人服务意识更加完善,成本相对市面较低,并且可根据使用者需求进行定制,可进一步扩大市场。其有着功能更集中化、价格更亲民化、应用更方便、技术更成熟等特点。
2. 系统设计
2.1. 设计背景
人口老龄化是我国当前乃至几十年后的一个重要社会特征 [2]。据权威部门统计,直到2018年底,我国60岁及其以上的老年人达2.49亿,其中失能、半失能老年人达4400万。到2025年,老年人口预计超过3亿,到2030年老年人人口占比约为30%。据中国残联最新调查显示,目前我国老年人及残疾人数量已经超过2.3亿余人,因为各种交通事故、自然灾害和种种疾病,每年平均有成千上万的人丧失一种或多种能力(如行走、动手能力等)。其中肢体残疾患者占据三分之一,多重残疾占比六分之一。由此可见中国已迈入老年化社会,如今老龄化问题严重,失能、半失能老人数量日益增加,这些老人在平常的生活中行动不便,生活不能自理,不仅为自己增添了困扰,更加重了家庭的负担,因此,对于帮助残障人士自主生活的智慧康养辅助机器人研究已逐渐成为热点。
同时,养老机器人作为目前智能养老服务行业的主流发展方向,其所具有的集成功能,将逐步取代仅有单一功能的产品,成为智能养老服务设备领域中市场份额最大的产品 [3]。尤其是人口老龄化和独生子女政策带来空巢老人数量的增加,导致未来对智慧康养机器人的迫切需求,例如在护卫、日托、医疗保健等智慧康养机器人需求方面能更为快捷的解决养老难的问题,给老人的生提供更好的保障 [4]。本项目能够根据老人的需要可以增加他们需要的功能,通过设计不同功能的机器人,使机器人的行动更加符合使用者的需求,令机器人的服务更加智能化,精准化,让老人能全身心的感到舒适,为老人的生活提供便利、陪伴与乐趣 [5]。
2.2. 系统总体结构
本次设计的智能康养辅助机器人系统主要由基于稳态视觉诱发电位(Steady-State Visual Evoked Potentials, SSVEP)的脑机接口(Brain Computer Interface, BCI)系统和语音识别系统和机器人控制系统组成。其中基于SSVEP的BCI系统如图1系统框图所示,主要包括五个部分:刺激块呈现、脑电信号采集、预处理、特征提取、特征分类识别 [6]。语音识别系统主要通过Python编程调用机器人的语音识别模块来实现。机器人控制系统主要应用到NAO机器人naoqi库中的指令模块来实现。
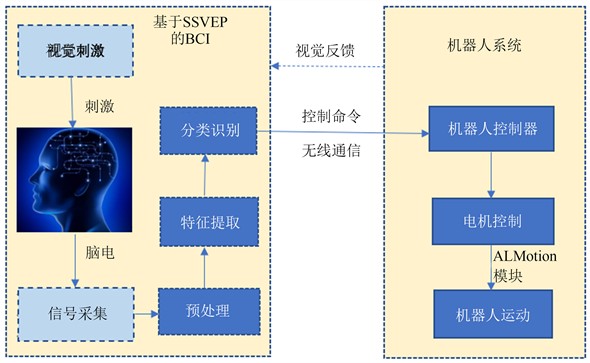
Figure 1. Schematic diagram of brain controlled realization of intelligent health assistance robot
图1. 智慧康养辅助机器人的脑控实现原理图
2.3. Naoqi OS系统的环境搭建
首先使用windows10版本的电脑设备,下载Python2.7的Anaconda并安装,安装完毕以后,将安装目录下的Python.exe文件路径和Scripts文件夹路径一起加入到电脑的系统变量PATH中。然后,下载安装Choregraphe,并安装对应的SDK库来进行环境搭建。此时就可以进行控制命令行下的Python编写NAO程序并执行。此外,通过Python和Choregraphe的结合能更高效快捷的对NAO机器人肢体方式与语言行为进行规划、调节与更改,实现NAO机器人自主规划路线规避障碍物。
2.4. 基于SSVEP的BCI系统
SSVEP是指当人眼受到固定频率刺激的时候,人的大脑视觉皮层会产生连续的与刺激频率有关的响应。BCI是指大脑与外部设备之间建立连接,实现大脑信号与外部设备的信息交换。近几年来,基于SSVEP的BCI技术在各方面我们也取得了快速的进展。而本次所设计的智慧康养辅助机器人所应用到的SSVEP-BCI技术面向的是失去自主行动能力和言语能力的老人以及残疾人群,希望能够通过脑电控制机器人的功能来满足他们自主生活的需求,提高生活质量。
与传统呈现视觉刺激范式的不同之处在于本次设计使用了混合现实技术(Mixed Reality, MR),即使用了MR眼镜进行视觉刺激范式的呈现,使用者在使用时不会受地点的限制。SSVEP相对于其他脑电信号(例如P300、运动想象)而言,具有无需训练、识别准确率高、数据传输率高等特点,更适合应用于BCI系统中。
使用者通过头戴类属湿电极的便携式电极帽,眼睛注视MR眼镜中由Unity 3D搭建的稳态视觉诱发刺激界面,在眼镜上会呈现五个闪烁频率不同的刺激块,依次是8 Hz、9 Hz、10 Hz、11 Hz、12 Hz分别代表五个指令 [7]。系统执行时会在MR眼镜中显示SSVEP刺激界面,当人眼被具有固定频率闪烁(或变换)的图形刺激时,大脑皮层会在初级视觉区产生连续且与刺激频率相关的信号,即SSVEP。由脑电帽采集,经过便携式脑电放大器对微弱的脑电信号进行放大后由计算机接受放大后的脑电信号。然后通过Labview编程将实时采集到的脑电信号通过FBCCA (Filter Bank Canonical Corrlation Analysis)算法进行识别刺激频率,进行特征提取,得到不同信号的控制指令,最后将控制指令通过网络通信的方式传递给机器人控制器,从而达到控制机器人移动的目的。具体实物如图2所示。

Figure 2. Physical picture of intelligent health assistant robot
图2. 智慧康养辅助机器人实物图
2.5. 语音指令识别系统
该智慧康养辅助机器人的语音识别系统主要是通过编写Python程序调用ALSoundRecognition语音识别模块的方式来实现。主要服务于具有言语能力的老人和残疾人群,在满足基本生活需求的同时提高生活质量。
识别过程是在线完成的,从语音获取开始,将音频录音传给科大讯飞进行语音识别转成文本,随后进行语义理解,将识别完的语义传递给NAO机器人,NAO机器人识别后做出相应的语音互动或行为指令反馈。语音识别过程中NAO机器人还会对“声音能量”和“语言输入”进行必要的“校正”,进一步提高识别指令的准确率,从而能够较为快速准确的实现 [8]。
2.6. 机器人控制系统
本次设计所用到的机器人为软银NAO机器人,该款机器人是一款双足型机器人,肢体较为灵活,且具有听、看、说的能力,能够与人互动,因而能够作为康养机器人去协助老年人及残障人群满足生活需求。为达到能够将脑电信号或语音信号传递给机器人完成相应指令反馈的目的,通过Python进行编程,调用机器人的ALMotion模块,来完成指令实现 [9]。
3. 创新点
3.1. 便捷性
对于脑电视觉刺激范式呈现的问题,本次设计加入了混合现实技术,使用MR眼镜进行视觉刺激范式的呈现,弥补了传统脑电设备限制使用地点的不足、指定识别效率低、不能精确服务的特点,具有较好的便携性和灵敏性。
3.2. 灵敏性
同时本次设计所用到的NAO机器人,具有较好的关节度,可进行抓放物体,自护避障,行动方式更为灵活,从而达到帮助老人及残障人群满足基本生活的目的。 [10]
3.3. 准确性
对于技术优化方面,在原来基础上调用ALSoundRecognition语音识别模块实现对语音的精确识别,将语音指令转换为机器语言被NAO机器人理解并执行,更能精确服务老人。
4. 实物调试运行
4.1. 脑电控制功能测试
被试者头戴脑电帽和MR眼镜,网络连接完毕后,MR眼镜中会出现不同闪烁频率的模块,代表不同的指令,当被试者注视不同频率的模块时,机器人会准确无误的完成下达的指令。
4.2. 语音识别功能测试
将机器人开机后,触摸机器人头部的传感器,触发机器人的语音识别功能,当使用者下达口头指令之后,在较快的时间内会做出相应的指令反馈,且出错率较低。
5. 结论
本次项目设计了一款面向老年人以及残障人群的智慧康养辅助机器人,通过将基于SSVEP的BCI技术、语音识别技术、MR技术结合起来,使脑电分析处理系统,智能语音识别系统,机器人控制系统集成于一体,达到能够帮助老人及残障人群满足基本生活需求和提高生活质量的目标。并且通过技术优化,性能分析,使得该智慧康养辅助机器人系统具有较好的便携性、灵敏性、准确性。
网址:基于语音控制及脑控的智慧康养辅助机器人设计 https://www.yuejiaxmz.com/news/view/112331
相关内容
DIY智能家居语音助理——语音智控万物 DF创客社区华为手机/平板/智能手表小艺语音控制家居设备失败
智能家居控制方案,手机电脑开启品质生活
iWiscloud智慧家居控制中心
基于ESP32的智能家居控制系统设计
基于STM32的智能扫地机器人设计
空调控制器详解
智能语音助手下载
基于51单片机DHT11的加湿器Proteus仿真程序设计:打造智能环境控制新体验
引领智能生活:语音识别控制芯片的前沿科技
随便看看
最新动态分享
- 家庭消毒不用愁!5大物理消毒法守护健康生活
- カビをアルコール退治|消毒用エタノールでの除菌方法やNG使用法も
- 消毒产品目录
- 基于STM32的智能鞋柜控制系统设计与实现
- 【解決】家具に生えたカビの取り方、予防法、原因を紹介
- 抗菌实验不同操作方法及细节对试验结果的影响
- 多部门推动物联网创新发展 到2028年这些技术要突破
- 生活区节水节电节能管控措施.docx
- 家庭节约用电有哪些具体方法?
- 北京市出台碳普惠管理办法 市民低碳行为将能“变现”
热点动态分享
- 145108
- 52288
- 45116
- 42485
- 40924
- 30910
- 25678
- 25535
- 21916
- 18621

