重磅!美日两国大学联手打造移动数字孪生自动驾驶导航系统
使用驾驶辅助系统,如GPS导航和自动巡航 #生活技巧# #驾驶安全技巧# #疲劳驾驶对策#
随着自动驾驶技术的飞速发展,车辆与万物互联(Vehicle-to-Everything, V2X)技术也在不断进步。近期,一项由日本东京工业大学及弗吉尼亚理工大学的研究团队共同推出的基于智能移动数字孪生(Smart Mobility Digital Twin, SMDT)的自动驾驶车辆导航系统,展示了这一领域的最新研究成果。
数字孪生(Digital Twin, DT)作为过去二十年来推动工业领域发展的重要技术,其核心在于构建物理世界的虚拟映射,并通过实时数据交互实现物理世界与虚拟世界的同步。随着自动驾驶技术和V2X技术的快速迭代,将DT技术融入车辆平台,有望彻底革新智能移动系统。
自动驾驶车辆的普及不仅依赖于高精度的传感器和强大的计算能力,还需要实时、准确的交通信息支持。SMDT平台通过集成云服务和数字孪生技术,能够显著提升自动驾驶车辆的“视野”,使车辆在复杂多变的交通环境中做出更智能的决策。
SMDT平台技术架构与核心组件
该研究提出的智能移动数字孪生(SMDT)平台,旨在通过整合云计算与边缘计算资源,构建实时的交通数字孪生模型,进而为自动驾驶车辆(CAVs)提供智能导航服务。平台架构分为三大核心部分:路边单元(RSU)边缘、CAV边缘以及中央云服务器。这三者之间通过车辆到基础设施(V2I)、车辆到云(V2C)以及基础设施到云(I2C)等多种V2X通信技术相互连接,共同支持交通数字孪生的创建、数据处理和用户交互。
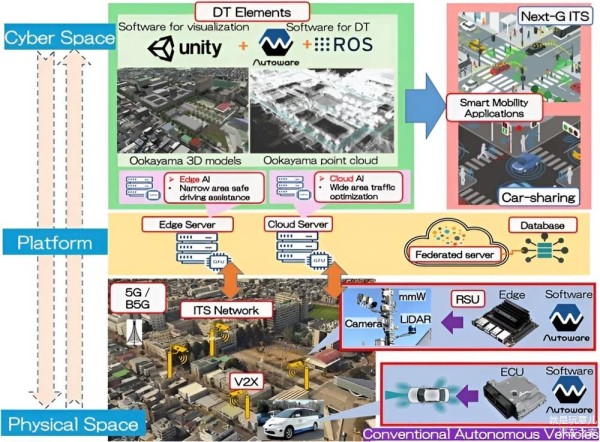
路边单元(RSU)在SMDT平台中扮演着至关重要的角色,它们主要负责高流量区域的交通监测。每个RSU都装备有多种传感器,如激光雷达(LiDAR)、摄像头等,以捕捉实时交通流量和事故信息。此外,RSU还具备接收来自连接车辆(CVs)的V2I通信数据的能力,这些数据通过多协议通信模块(如Wi-Fi、毫米波等)进行传输。
在硬件方面,RSU通常配备高性能的计算设备(如NVIDIA Jetson等),用于处理来自传感器的原始数据,并执行诸如对象检测、跟踪等任务。这些处理结果随后被上传至中央云服务器,以构建更全面的交通数字孪生模型。
自动驾驶车辆(CAVs)作为移动的路边单元,在SMDT平台中同样扮演着重要角色。每辆CAV都配备了车载传感器(如LiDAR、雷达、摄像头等),用于实时感知周围环境,包括道路状况、行人、其他车辆等。CAV还通过V2C通信技术与云服务器保持实时连接,上传自身位置、速度、加速度等信息,并接收来自云服务器的导航指令。
在软件层面,CAV通常运行着基于Autoware或ROS(Robot Operating System)的自动驾驶系统。这些系统能够处理来自传感器的原始数据,实现车辆定位、局部路径规划、运动控制等功能。同时,它们还能够根据云服务器发送的导航指令调整车辆行驶路线,避开潜在的交通拥堵或事故区域。
中央云服务器作为SMDT平台的数据中心,负责整合来自RSU和CAV的边缘数据,构建实时的交通数字孪生模型。服务器具备强大的数据处理和分析能力,能够对海量交通数据进行深度挖掘和分析,为自动驾驶车辆提供更加精准的导航服务。
在通信方面,云服务器通过I2C通信技术接收来自RSU的实时交通数据,并通过V2C通信技术向CAV发送导航指令。为了确保通信的可靠性和低延迟性,服务器通常部署在地理位置优越的数据中心,并采用先进的网络架构和传输协议(如HTTP/2、QUIC等)。
SMDT平台的核心组件——RSU边缘、CAV边缘和中央云服务器——通过紧密的协同工作,共同实现了交通数字孪生的构建和自动驾驶车辆的智能导航。具体来说,RSU负责采集和上传实时交通数据;CAV负责接收导航指令并执行自动驾驶任务;云服务器则负责数据处理、分析和导航指令的生成。三者之间通过高效的V2X通信技术实现无缝连接和数据共享,共同构成了SMDT平台的完整技术架构。
基于SMDT平台CAV导航系统落地案例实测
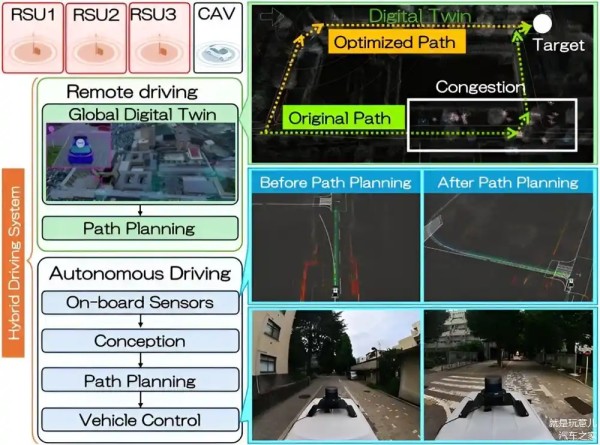
在SMDT平台中,CAV导航系统是一个重要的应用案例,它充分展示了平台在实际交通环境中的应用潜力和价值。该导航系统基于实时的交通数字孪生模型,通过动态规划最优行驶路线,帮助自动驾驶车辆避开潜在的危险区域,如交通事故现场或严重拥堵路段,从而提高交通效率和安全性。
CAV导航系统采用事件触发的动态路径规划策略。当自动驾驶车辆进入路网时,系统会根据当前的交通状况生成最优的初始行驶路线。在行驶过程中,如果检测到路网中发生了突发事件(如交通事故、行人聚集等),系统会立即触发重规划机制,为车辆生成一条避开这些事件的新路径。这种动态路径规划策略确保了车辆在复杂多变的交通环境中始终能够选择最佳的行驶路线。

CAV导航系统依赖于交通数字孪生模型提供的实时路况信息。该模型通过整合来自路边单元(RSU)和自动驾驶车辆(CAV)的传感器数据,构建了一个全面的交通环境虚拟镜像。这个镜像能够实时反映路网上的车辆分布、速度、事故等信息,为导航系统提供了精确的路况感知能力。基于这种感知能力,系统能够准确判断哪些路段存在潜在的风险,从而指导车辆进行路径规划。
CAV导航系统的实时性和准确性离不开高效的V2X通信支持。在系统中,路边单元(RSU)、自动驾驶车辆(CAV)和中央云服务器之间通过车辆到基础设施(V2I)、车辆到云(V2C)等多种V2X通信技术实现了无缝连接和数据共享。这种高效的通信机制确保了路况信息的实时传递和导航指令的准确下发,为导航系统的稳定运行提供了有力保障。同时,通过采用先进的加密和安全协议,系统还确保了通信过程中的数据安全和隐私保护。
系统验证与性能评估
为了验证SMDT平台及CAV导航系统的性能,研究团队在东京工业大学智能移动研发场进行了实地验证,并使用SUMO(Simulation of Urban MObility)交通模拟器进行了大规模仿真实验。
在实地验证中,研究团队成功展示了系统在检测到行人聚集和交通事故等突发事件时的动态路径规划能力。实验结果表明,系统能够实时检测事件并有效调整车辆行驶路线,显著提高了交通效率和安全性。
通过SUMO仿真实验,研究团队评估了系统在不同交通流量和事件发生率下的性能表现。仿真结果显示,随着CAV渗透率的增加,整体交通效率和安全性均有所提升。特别是在高交通流量和事件频发的情况下,CAV导航系统能够显著降低车辆平均行驶时间和事件遭遇次数。
此外,系统还展现了良好的可靠性和低延迟特性。在仿真实验中,交通数字孪生建模的最大延迟为155.15毫秒,而路径规划服务的最大延迟为810.59毫秒,均满足3GPP对V2X用例的延迟要求。
应用前景与挑战
基于SMDT平台的CAV导航系统展现了巨大的应用潜力。未来,该系统有望在智慧城市、智能交通等领域发挥重要作用。自动驾驶车辆依赖于V2X通信网络的稳定性和准确性。未来需增强网络通信的加密和安全性,同时提高传感器性能和冗余设计,确保系统在高动态环境下的稳定运行。
为了进一步提升系统的智能化水平,需集成更多类型的传感器和采用更先进的传感器融合技术。同时,结合大数据分析和机器学习算法,提高环境感知和决策制定的准确性和效率。随着自动驾驶技术的普及,相关法规和标准亟待完善。未来需加强国际间合作,制定统一的自动驾驶车辆测试、评估和认证标准,促进技术的健康有序发展。
结语与未来:
研究人员提出的基于智能移动数字孪生的自动驾驶车辆导航系统,通过整合云计算、边缘计算及V2X通信技术,实现了对复杂交通环境的实时感知与动态路径规划。实验结果表明,该系统显著提升了交通效率和安全性,验证了智能移动数字孪生在实际应用中的巨大潜力。未来,随着技术的不断进步和基础设施的逐步完善,该系统有望在城市交通管理中发挥更加重要的作用,推动智能交通系统的全面发展。
网址:重磅!美日两国大学联手打造移动数字孪生自动驾驶导航系统 https://www.yuejiaxmz.com/news/view/1148836
相关内容
未来系列之黑客帝国、数字孪生和车联网数字孪生+智慧物联,大华股份「数智孪生」助力数字化场景落地
汽车影音GPS导航系统,塑造驾驶乐趣
中国移动长三角数据中心创新节能减碳数字孪生系统
智驾领航辅助(NCA),是华为ADS智能驾驶辅助系统的一项重磅功能…
不止自动驾驶 现代推智能生活解决方案
什么是数字孪生?
GNSS在车载导航和自动驾驶中的应用
VEStellaLab推出用于自动驾驶汽车的室内停车导航系统
李德仁院士:数字孪生助推我国智能交通、数字交通快速发展
随便看看
最新动态分享
- 适合搭配的食材
- 食疗养生大全:67种天然食材搭配与食疗方,吃出健康好气色
- 哪些食材可以搭配食用 十对最佳食材搭配好吃又健康
- 壮阳补肾煲汤大全:中药配方与食材搭配全解析
- 广东鱼肚汤的家常做法大全|营养功效+食材搭配+5种经典汤谱(附详细步骤)
- 四季美容养颜豆浆配方大全|天然食材搭配+科学原理,喝出透亮肌
- 零失败家常小炒菜谱大全(附新手必学技巧+食材搭配指南)
- 补肾食谱大全:10种家常食疗方+食材清单,科学搭配提升肾动力
- 5种营养搭配!家常鸡汤快手做法大全(附不同做法+食材禁忌)
- 麻辣香锅食材菜单大全图
热点动态分享
- 144614
- 47933
- 44629
- 40524
- 40439
- 30644
- 25146
- 25043
- 21629
- 18315

