爬壁机器人研究现状及发展趋势
科技趋势17: 生物打印器官的研究取得进展 #生活知识# #科技生活# #科技趋势#
本期阅读
文章信息
爬壁机器人研究现状及发展趋势
马吉良,彭军,郭艳婕,陈雪峰
DOI:10.3901/JME.2023.05.011
引用本文:
马吉良, 彭军, 郭艳婕, 陈雪峰. 爬壁机器人研究现状及发展趋势[J]. 机械工程学报, 2023, 59(5): 11-28.
MA Jiliang, PENG Jun, GUO Yanjie, CHEN Xuefeng. Research Status and Development Trend of Wall Climbing Robot[J]. Journal of Mechanical Engineering, 2023, 59(5): 11-28.
原文阅读(摘要)
摘要:爬壁机器人是指能够依附在物体的表面进行多自由度移动并完成作业的机电系统,特别适用于执行特殊任务,因而具有良好的应用前景和广泛的市场需求。根据黏附机理的不同,爬壁机器人可分为负压吸附、静电黏附、仿壁虎干黏附、仿生湿黏附等类型。从黏附机理、应用范围以及黏附特点三个方面概述了爬壁机器人领域的国内外研究现状,为统一分析比较不同种类爬壁机器人的负载性能,提出基于比黏附能密度的机器人整体黏附性能分析方法,并为解决其大负载和小体积之间的矛盾提出新的材料和结构设计思路,分析微型爬壁机器人在航空发动机故障检测领域的应用前景,总结出其在材料智能化、驱动新型化、体积小型化和黏附机理协同化等方向的发展趋势。
关键词:爬壁机器人;黏附机理;仿壁虎;航空发动机检测机器人;静电黏附
中图分类号:TH17;TP242
0 前沿
爬壁机器人在诸多领域都有着较为广泛的应用,如建筑外墙的清洁、飞机外壳的维修、大型油气罐的检测等。随着生产自动化的发展,人们对机器人的需求量越来越高,也对爬壁机器人的设计提出了越来越高的要求。为满足在受限空间和复杂的工作环境完成更多种类的工作,小体积、高负载成为了爬壁机器人的迫切需求,但这也成为该领域的研究挑战,主要体现在以下三个方面。
黏附性有瓶颈。作为爬壁机器人的运动和作业的基础,黏附性不仅决定着其负载能力与运动稳定性,也影响着其对多种表面的适应能力。自然界中具有爬壁能力的动物如壁虎、树蛙等不仅可以灵活地完成黏附与脱附过程,而且可以在多种表面之间自由爬行,其强大的攀爬能力与自身结构和黏附功能是分不开的。但这些动物的黏附足结构复杂且材料多为生物蛋白,因此想要直接仿制十分困难。目前除了仿生黏附[1-8]手段以外,应用较为广泛的黏附方式还包括真空负压吸 附[9-10]、永磁吸附[11]、静电黏附[12-13]等,但每种方式都存在各自的优点与不足。
轻量化有困难。为了适应陡峭的壁面环境以及携带更多功能模块,爬壁机器人需要更低的重心设计与更轻的总体质量。但为了满足机构强度与运动灵活性,机器人的机械结构部分往往有较多的金属零件,如何减轻机器人质量也成为了爬壁机器人研究的难点。在目前的研究中,主要采用简化运动机构以及使用高强度低密度材料(如碳纤维、钛合金、高强度树脂等)的方法减轻机器人的质量[14-17]。
小型化有难度。爬壁机器人在复杂环境中执行任务时往往需要穿过狭小的孔缝,因此小体积是前提。机器人的小型化一直以来都是研究的难点之一,爬壁机器人复杂的黏附足与运动机构设计则进一步加大了机器人小型化设计的难度。目前主要的解决思路是简化运动机构以及探索新驱动方式[18-25]。
针对以上爬壁机器人在设计和研究中存在的主要问题,本文依据黏附力的产生有无外部供能的不同,从不同黏附机理出发对近年来爬壁机器人研究的相关成果进行归纳整理,对比分析不同种类爬壁机器人的黏附原理、制备工艺以及相关应用。
现有的综述文献对于不同原理的爬壁机器人的研究现状已经有了较为详尽的分析和总结,但仍缺少对多种爬壁机器人负载性能的统一分析,因此本文综合考虑黏附材料密度和机器人体积,提出以比黏附能密度γ作为评价参数,实现对比分析不同黏附机理机器人的黏附性能,并在此基础上结合航空发动机检测领域的研究现状,分析微型爬壁机器人在该领域的应用前景。最后总结了爬壁机器人在材料智能化、驱动新型化、体积小型化和黏附机理协同化四个方向的发展趋势。
1 爬壁机器人的相关研究
随着黏附机理相关研究的深入,近年出现了基于多种黏附机理的爬壁机器人设计。本文根据黏附力的产生是否需要外场持续供能的不同,总体将黏附分为有供能黏附和无供能黏附两类。有供能黏附又包括真空负压吸附与有缆静电黏附,无供能黏附又包括仿壁虎干黏附与仿生湿黏附。本文将逐一介绍基于以上四种原理爬壁机器人的黏附原理、加工工艺以及黏附特点,并选取近年来代表性的工作予以综述。
1.1 负压吸附
1.1.1 负压吸附原理
真空负压吸附是通过吸盘内外负压差的作用在壁面产生黏附力从而实现的黏附作用,按照负压发生装置的不同可分为真空泵、文丘里管和离心风 扇等。
真空泵是最常见也是最早用于爬壁机器人的负压发生装置,其一般为往复式真空泵。如图1a所示,往复式真空泵主要由气缸、气阀、活塞以及连杆机构组成,在工作过程中曲柄连杆机构在电机的驱动下推动活塞进行周期往复运动,从而将气体从下端运送到上端。
离心风扇是通过风扇旋转将气体甩出,从而在中心处形成负压区的一种负压发生装置。其一般由电机驱动,并通过径向和轴向的气道与外部连接。如图1b所示的是一种径流式离心风扇的原理示意图,在工作时风扇转动,气体会在离心力的作用下不断由中心向外排出,因此利用离心风扇配合密封装置可以制成负压吸盘,为爬壁机器人提供吸附力。
文丘里管(Venturi tube)是由意大利物理学家文丘里发明的一种负压发生装置。如图1c所示,其内部结构主要包括喷嘴、扩张室和真空气室。在工作时,由压缩机产生的高速气流会由A端进入文丘里管,并最终由C端排出。采用这种原理可以利用较低的流量产生较高的负压差,工作效率较高。
1.1.2 应用
在真空吸附原理爬壁机器人的早期设计中,由于真空泵存在难以小型化的问题, 只能采用负压源外置的方法减轻机器人的质量,即将真空泵外置并通过细长气管与机器人爬行足末端的吸盘相连接,并大多采用多足式运动机构。1992年日本东京工业大学学広瀬茂男领导的研究小组开发了NINJA四足爬壁机器人[26],如图1d所示,其利用绳传动机构进行驱动,可以实现壁面、天花板以及各平坦表面之间的过渡运动。在1999年该小组又推出了NINJA-II爬壁机器人[27],在原有的基础上增加了腿部的转动关节,提高了腿部运动的灵活性。
随着制造工艺的不断进步,真空泵的微小型化得以实现,随之产生了内置真空泵的爬壁机器 人[28-29]。该类机器人以小型化和运动灵活性为设计目标,同时内置电源的设计让其摆脱缆线的限制。2004年由密歇根州立大学研发了一款尺蠖式爬壁机器人FLIPPER[30-32],如图1d所示,其双足末端真空吸盘能有效吸附地板、墙壁及天花板,具有很强的适应能力。欠驱动机构形式可以减轻机器人的重量,减少能耗,但只能以空翻的方式运动。2010年华南理工大学的ZHU等采用模块化的方法开发了一种新型的双足爬壁机器人W-Climbot[33],如 图1d所示,其由一个机械臂作为主体,两端有两个真空吸盘,具有优秀的跨表面运动以及跨越障碍的能力。通过在尺蠖步态、转身步态和翻转步态这三种运动模式之间切换,W-Climbot可以跨越长达400 mm的空隙或障碍,越过415 mm高的障碍物,并能够在夹角为0~289°的两个壁面之间进行切换。内置真空泵的爬壁机器人由于真空泵的小型化,具有低噪声、低能耗的优点。
多臂协作机器人是一种能够协同工作的机器人系统,它由多个协作机械臂和控制系统组成,能够在不同的工作场景中协同工作,提高工作效率和灵活性。其中,协作臂通常具有不同的长度、载荷能力和工作半径,以适应不同的工作场景。控制系统包括感知、规划和控制等方面的软件和硬件组件,能够准确感知周围的环境和其他机械臂的位置,通过规划和控制来协同工作。多臂协作机器人目前还没有明确的定义与分类,以下归纳出现在常用的几种基本类型及其一些应用场景。
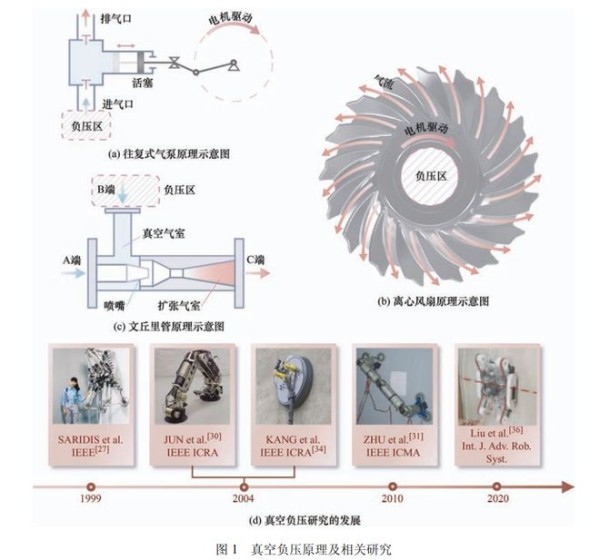
不满足于真空泵与吸盘组成的单一机构设计,学者们将新的负压发生原理也引入到爬壁机器人的设计当中。2004年,由德国 Karlsruhe 大学、英国Portsmouth 大学及德国联邦材料研究测试中心联合研发的大脚机器人系列便是利用文丘里管作为负压发生装置的爬壁机器人[34-35]。如图1d所示,其中第二代原型样机BigFootII质量20 kg,可产生负压50 kPa,其内部使用轮胎驱动,可以越过 2 cm 高度的障碍,可以适应略微弯曲的表面。文丘里管作为负压发生装置体积小、发热量低,并具有结构简单、维护方便的优势。
高速旋转的离心风扇可以持续产生较大的负压差,因此被越来越多地用作爬壁机器的吸盘结构当中。2020年中国科学技术大学LIU等提出了一种新型的光滑壁面检测爬壁机器人[36],如图1d所示,其由真空吸附系统和黏附履带组成,具有在平整表面上灵活运动的能力。在混凝土表面上,该机器人的最大移动速度可达7.11 cm/s并负载0.8 kg。采用离心风扇作为负压发生装置的爬壁机器人具有吸附力强,抗干扰能力强的优点。
1.1.3 吸附特点
负载能力强。通过提高负压源的工作功率,吸附结构可以获得更大的负压差,吸附力也随之增强。因此机器人可以获得更强大的负载能力和运动稳定性,并携带多种设备以完成更复杂的 工作。
噪声较大。无论是基于往复式真空泵、文丘里管还是离心风扇原理为吸附结构产生负压,机器人在工作时内部高速气流和高转速的电机都会产生较大的噪音。
漏气问题影响较大。真空吸附产生的吸附力与吸附结构内外的压力差密切相关,因此漏气问题对吸附力的影响尤为明显。真空吸附结构的尺寸一般较大,采用离心风扇原理的爬壁机器人其负压腔体更是占据了机器人的绝大部分空间,较大的吸附面积会带来较多的密封性问题,在吸附表面存在凸起、裂纹或粗糙度较高时,由真空负压产生的吸附力往往不稳定。
1.2 静电黏附
1.2.1 黏附机理及制备工艺
静电黏附是一种基于静电感应原理,通过控制电流的通断来控制黏附力有无的可控黏附技术。1910年两位丹麦科学家JOHNSEN和RAHBEK发现两种相互接触的材料存在电位差时会因为静电作用而相互吸引[37],并以J-R效应来描述导体与半导体接触并施加电压时的黏附力[38],由此产生了静电黏附技术。
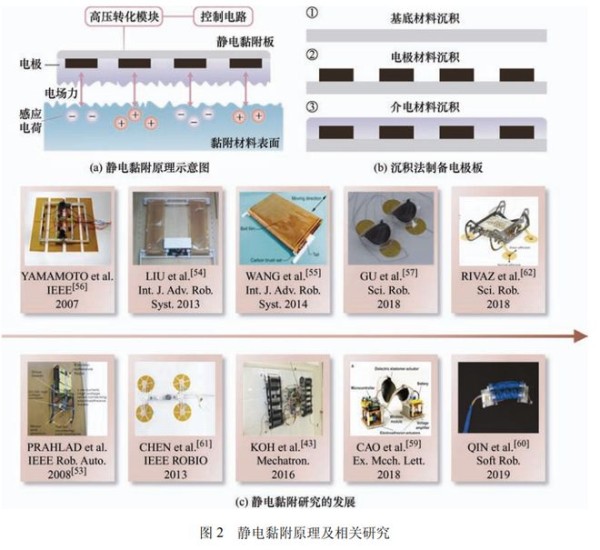
静电黏附系统的主要由控制电路、高压转换模块、静电黏附板和黏附表面组成,静电黏附板的内部结构如图2a所示,正负电极交替排列在绝缘柔性聚合物中,在施加电压时由于正负电极间绝缘材料的作用,正负电荷会在电极处聚集而无法中和,而交错排列的结构则让电荷的密度大大增加,最终让薄片状的黏附材料内部集聚大量正负电荷[39]。而静电黏附板与黏附表面之间由于静电感应的作用,黏附表面也会产生大量相反极性的感应电荷,由于异性电荷的相互吸引,黏附材料与黏附表面之间就产生了黏附力。
静电黏附材料制备工艺主要有增材制造、减材制造和增减结合三类,其中增材制造主要应用的工艺有喷墨打印[40-41]、丝网印刷[42-43]、模塑成型[44-46]等,减材制造主要使用的工艺包括人工切割[47-48]、机床加工[49]等,增减结合主要指PCB或FPCB[50-52]等工艺,图2b中示意了一种增减结合的制备工艺。
1.2.2 应用
静电黏附在爬壁机器人领域的应用较为广泛,根据其运动机构可分为履带式、尺蠖式和多足式。履带式爬壁机器人伴随着柔性静电黏附材料而产生,是对静电黏附材料较为直接的应用。2008年SRI国际公司PRAHLAD等首次将柔性静电黏附材料应用于履带式爬壁机器人[53]。其利用柔性静电黏附片制成履带进行黏附,最大黏附力可达2 N/cm²,总质量220 g,可在光滑表面爬行,可攀爬垂直表面并进行跨表面运动。2013年北京航空航天大学LIU等基于静电黏附技术设计出了一款双履带爬壁机器 人[54],总长360 mm,负载能力20 N,可在垂直壁面以0.2 mm/s速度爬行。
2014年东京大学WANG等利用丝网印刷技术制成的薄膜电极作为履带制作出了履带式爬壁机器人[55],其重94 g,高度15 mm,可在垂直壁面以35.3 mm/s的速度爬行。2016年莫纳什大学KOH等提出了一种利用静电、弹性体黏附力和尾部支撑力运动的履带机器人ELAD[42],其可以在80°光滑表面上以4 cm/s的速度爬行,可在粗糙度300 nm以内的表面工作。
尺蠖式爬壁机器人一般采用成对的电极板作为黏附足,由于其运动机构更为简单,往往更适合小型化机器人的设计。2007年东京大学YAMAMOTO等利用塑料薄膜和梳状导电箔片制成了柔性电极板,并利用四块柔性电极板和矩形框架制成了尺蠖步态的爬壁机器人[56],如图2c所示,其可在垂直表面爬行,最大速度6.6 mm/s。2018年上海交通大学GU等同样利用介电弹性体与静电黏附垫制作了一款尺蠖式软体机器人[57]。如图2c所示,该机器人将电源外置,可在木材、纸张、玻璃等表面自由爬行,并能完成垂直攀爬、转弯等动作,每秒最多可前进0.75体长。2018年多伦多大学的WU等设计出了一种纸基爬壁机器人[58],其可在垂直壁面进行二维运动,最大可提供1.65 N摩擦力,运动速度1 mm/s。2018年新加坡国立大学CAO等制作出了一种内置电源的无约束软体机器人[59],如图2c所示,其在工作时由微型控制器依次将变压器放大后的电信号传递给两个黏附足与介电弹性体,进而完成两个黏附足交替前进的尺蠖步态。2019年新加坡国立大学QIN等设计了一款可以快速高效运动的软体爬壁机器人[60],如图2c所示,其利用真空驱动弹簧作为驱动装置,结合静电黏附技术实现了平面上的前进和转弯运动。
多足式是爬壁机器人的另一种常见的运动机构设计,具有更高的运动稳定性与更灵活的运动能力。如图2c所示,2013年北京航空航天大学CHEN等基于壁虎对角步态运动的启发,结合静电黏附原理,设计出了一款可以实现垂直光滑表面的直线攀爬与转向运动的四足爬壁机器人[61]。2018年哈佛大学RIVAZ等基于初代HAMR样机改进并设计出了一款仅重1.48 g,长4.5 cm的四足微型爬壁机器人HAMR-E[62]。如图2c所示,其利用集成化的腿部结构实现了精确的腿部运动和静电黏附,可以在水平面140 mm/s的速度爬行,也能以1.2 mm/s的速度攀爬垂直墙壁。
1.2.3 黏附特点
黏附材料体积小。为了获得较大的黏附力,静电黏附材料需要尽可能减少介电层厚度,因此制备出的黏附材料整体体积一般较小,有利于机器人的小型化设计。
维持黏附力所需功耗低。由于供电电路具有高电压、小电流的特点,整体功耗一般很低[49,63],所以使用静电黏附材料的爬壁机器人一般不需要携带大容量的供能元件。
需要较高电压。2019年XIE等发现静电黏附材料的工作电压普遍大于1.5 kV[64]。较高的工作电压使得机器人需要配备相关的变压电路,甚至只能采用连接缆线的方式进行供电,大大限制了机器人运动的灵活性。
黏附力不稳定。静电黏附材料产生的黏附力Fadh可以简化表示为

式中,A为电极面积, 为真空介电常数, 为材料的相对介电常数,V为施加电压,d为介电层厚度。在机器人正常工作时,电极面积、工作电压、介电层厚度均不会发生明显变化,但介电常数却与黏附表面的材料特性相关,并容易受到如湿度等外界环境变化的影响。
1.3 仿壁虎干黏附
1.3.1 黏附机理与制备工艺
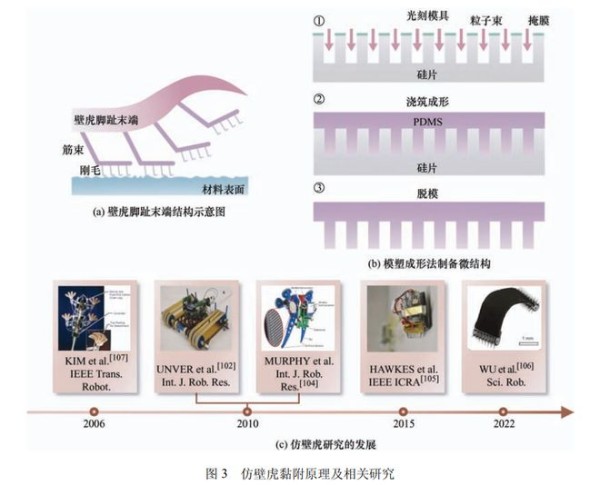
黏附材料一般需要持续供能以维持黏附,这不仅需要相应的储能、供能模块,而且增大了机器人的整体功耗,此时仿生学的引入为黏附材料的研究提供了新的思路。在众多具有爬壁能力的动物中,大壁虎的爬行能力显然是最为突出的:自然界中的大壁虎体重可达100 g,体长超过30 cm,其最快爬行速度可达1 m/s[65-68]。2000年,美国加州大学伯克利分校AUTUMN等利用MEMS传感器首次测量了壁虎脚趾表面单根刚毛所能提供的黏附力和摩擦力[69],并证明了其主要来源是刚毛末端绒毛与壁面间的分子间力[70]。如图3a所示,研究发现壁虎通过多级纤维结构与表面相接触,并通过刚毛与接触表面之间的范德华力、毛细力[71]、静电力[72-73]以及酸碱相互作用[74]等实现干黏附,并通过对脚趾刚毛施加切向力来控制刚毛的法向黏附力[75-77],因此若要实现各向异性的干黏附,关键在于仿制出壁虎脚趾刚毛的微观结构。
多级纤维结构在尺度上跨越了多个数量级且结构复杂,因此其制备工艺一直是学术研究的热点。目前主流的制备方法主要有两种,一是模塑成型法,通过光刻等工艺加工高精度模具[78-82],再通过翻模成型的方式制备出所需结构;二是直接成型法,通过3D打印[83-85]、化学气相沉积[86-88]等工艺直接制备出微米或纳米尺度下的微观结构。
模塑成型法是在仿壁虎黏附材料研究中应用最早且最广泛的制备方法,其优点在于较高的加工精度以及较多的材料选择。如图3b所示,模塑成型工艺一般采用掩膜光刻的方法对硅片进行加工,选取多种橡胶、树脂等材料以满足性能需求,并通过控制模具与液态聚合物之间的气泡[89]、控制脱模时聚合物的固化程度[90-94]、电子束蚀刻[95]、施加外力[96-98]、倾斜曝光[99-101]等后处理方法制备出多种多样的微观结构。
直接成型法是随着近年来增材制造技术迅猛发展而诞生的一种方法,其优点在于工艺流程简单、可实现三维设计加工。它是一种以数字模型文件为基础,运用粉末状金属或树脂等可粘合材料,通过逐层打印的方式来构造物体的技术。近年来随着3D打印技术的不断发展,其成型原理也多种多样,如双光子聚合激光直写(TPP)、激光逐点扫描固化(SLA)、面投影立体光刻(DLP)等。除此之外化学气相沉积法(CVD)也属于直接成型法的范畴。
1.3.2 应用
履带式爬壁机器人通过将黏附材料附着在柔性基底上作为履带实现黏附与爬壁运动,是对黏附材料较为直接的应用。2004年美国卡耐基梅龙大学(CMU)的SITTI等制作出了Tankbot第一代样机,其可以实现在110°的壁面上稳定运动,但由于机构设计的局限,只能进行直线前进运动。2010年此小组研发了新一代Tankbot样机[102],其采用无表面结构的聚氨酯为黏附带,具备了良好的三维空间表面运动能力,可以在0~360°光滑表面上以5 cm/s的速度前进,也可以在垂直的粗糙表面上运动。履带式爬壁机器人具有机构设计与运动控制简单、运动速度快、负载能力强的优势。
轮腿式爬壁机器人将黏附材料附着在多个腿上,再将腿均匀装配在转轮上组成轮腿,这样在转轮转动时其上的腿会依次与表面接触和分离,通过调整两侧转轮的步态即可实现机器人的前进与转向等动作。2004年CMU公布了第一款轮腿式爬壁机器人Waalbot[103]。2010年CMU在此基础上改进设计出了WaalbotII[104],与上一代相比提高了整体爬壁能力,能够适应粗糙表面并能在倒置的光滑表面上全方位爬行,也能实现多种普通角度壁面之间的过渡。轮腿式爬壁机器人具有运动控制简单、负载能力强的特点,同时对非平整表面也有一定的适应能力。
尺蠖式爬壁机器人将黏附材料附着在两个黏附垫上,通过两个黏附垫交替运动实现黏附和爬行。2015年斯坦福仿生及灵巧机械臂实验室(Stanford BDML)HAWKES等设计出了一款质量仅有9 g负重可达1 kg的微型爬壁机器人[105],其工作时仅需要驱动电机将连接两个黏附垫的线收紧和放松便能实现机器人的单向直线运动,可在垂直表面爬行,运动速度3 mm/s。2022年范德堡大学WU等设计了一种毫米级无线控制的软体机器人[106],如图3c所示,其由外部磁场驱动,通过仿壁虎材料实现可控黏附,可在三维生物组织表面爬行。尺蠖式爬壁机器人利用了倾斜纤维阵列的各向异性黏附特点,仅凭单个驱动便完成了仿尺蠖步态的单向直线运动,运动机构和运动控制得到进一步简化。由于其微型化的设计,机器人整体的黏附面积占比更大,因而负载能力优秀,同时也能在一定程度上减轻因黏附失效对运动过程的影响。
多足式爬壁机器人是模仿自然界中的爬行动物以及昆虫的步态,通过多个黏附足交替运动实现黏附和运动的一种机器人。2006年斯坦福大学KIM等发明了一种四足爬壁机器人Stickybot[107],它在运动机构和黏附机构上都参考自然界中的大壁虎进行仿生设计,可以适应光滑平面并以4 cm/s的速度攀爬垂直表面。Stickybot 2012年该小组在此基础上改进并推出了Stickybot III,使用了光刻工艺的各向异性材料代替脚趾结构,并用五杆机构代替四杆机构以提供额外的自由度。2008年加拿大西蒙弗雷泽大学MENON等公布了一种仿蜘蛛六足爬壁机器人Abbigaille[108],该机器人质量131 g具有六条对称分布的足,可以实现50°斜面上的黏附爬行。2011年该小组在此基础上改进并推出了Abbigaille-II[109],采用PDMS和PMMA双层材料的蘑菇状纤维阵列为黏附材料,并可在垂直表面以0.1 cm/s的速度爬行。多足式爬壁机器人具有运动方式灵活,对非平整表面适应性强,对黏附失效抵抗力强的优点。
1.3.3 黏附特点
负载能力强。仿壁虎黏附材料主要依靠多级纤维结构与黏附表面之间的分子间作用力完成黏附,相比于自然界中的壁虎有着相似甚至更为强大的黏附力,因此设计出的爬壁机器人普遍具有较强的负载能力。
黏附可控,自然界中的壁虎通过脚趾的收紧和外翻实现与表面之间的黏附和分离,仿壁虎材料也可以通过倾斜结构[100]、切割花纹[105]、弯折基底[98]等方法实现黏附可控。
加工工艺较为复杂。仿壁虎黏附主要利用范德华力进行黏附,因此需要黏附材料与黏附表面之间的距离达到纳米级,这就需要仿壁虎黏附材料本身具有微米乃至纳米尺度的结构,对制备工艺提出了较高的要求,并可能存在工艺流程复杂和制备出的材料性能不稳定的问题。
需要垂直方向的预载力。仿壁虎黏附材料往往具有较大的切向负载能力,但由于范德华力的作用距离较小,黏附材料只有在与黏附表面充分接触以后才能发挥出强大的黏附效果,因此仿壁虎黏附材料在黏附前一般需要施加法向的预载荷。
1.4 仿生湿黏附
1.4.1 黏附机理与制备工艺
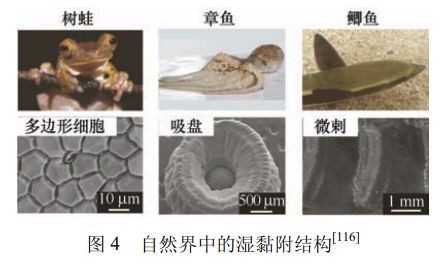
为适应潮湿表面和复杂表面环境,自然界中的许多生物如章鱼、鮣鱼、树蛙等进化出了特殊的微米/纳米结构。如图4所示,章鱼利用触手上的吸盘在海底爬行和捕捉猎物,吸盘上密集的毛发状结构有助于增强对基底的吸附作用[110-111]。树蛙利用脚趾垫在潮湿的树枝上灵活地爬行,脚趾垫上凸起的多变形状上皮细胞可以与树皮上的不规则表面结合,而细胞之间的明显缝隙有助于排出界面的水分和输送粘液[112-114]。而鮣鱼背部的圆盘能让自己附着在鲨鱼或鳐鱼身上,圆盘由一列带小刺的平行薄片组成,这些小刺增加了与吸附表面之间的摩擦力[115-118]。虽然表面结构各不相同,但它们都有着类似的吸附机理,对于面积为A,压差为 的吸盘,吸附力F可表示为[119]
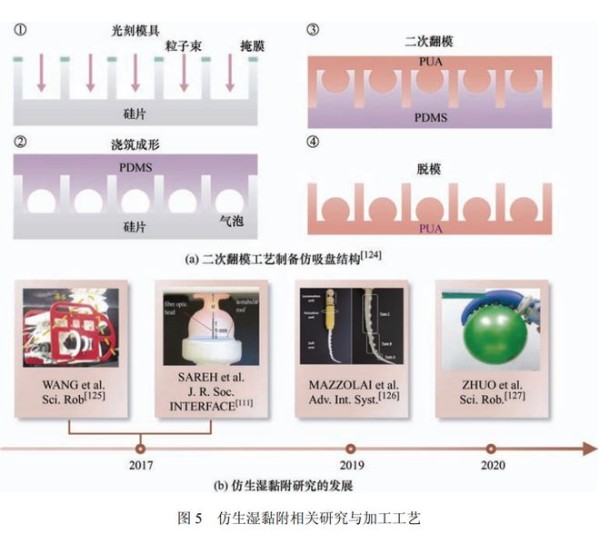
仿生湿黏附由于黏附过程需要产生一定的形变和负压,其结构相比于仿壁虎黏附一般更为复杂。仿生湿黏附材料一般包括用于维持几何形状、增大摩擦力的刚性部分,用于加强密封性、适应多种表面的柔性部分,以及用于提供负压气体通道。其中柔性部分一般采用有机聚合物材料[120-124],采用模具浇筑的方法成型(图5a);刚性部分一般采用无机材料(如合金、碳纤维),采用激光切割等方法进行加工,也可以使用高硬度聚合物材料代替。
1.4.2 应用
2017年北京航空航天大学WANG等通过对鮣鱼的形态与运动研究设计出了一款仿鮣鱼水下机器人[125]。如图5b所示,其利用3D打印技术加工出了片层结构和碳纤维小刺,并将其附着在软体驱动器制成了仿鮣鱼吸盘结构,可以适应多种粗糙度的表面并提供自重340倍的吸附力。2019年意大利技术学院微型生物机器人中心(IIT)MAZZOLAI等结合了柔性与刚性硅基材料制备出了一种带有吸盘的圆锥形软体机械臂[126],如图5b所示,其通过线驱动和气压驱动,可以在空气、水和油中抓取各种复杂形状的物体,最高抓取力可达3.3 N。2020年北京航空航天大学ZHUO等通过在微有机包裹体中添加非共晶相变组分合成出了精确可控的多相有机水凝胶,并设计出了仿章鱼触手的软体机器人[127]。如图5b所示,其通过气压和温度混合控制,可以实现三维空间内的自由运动,并能抓取球形、立方体等多种形状的物体,表面的吸盘可以适应0~200 μm粗糙度的表面,单个直径15 mm的仿生吸盘最大可提供4 N的吸附力。
1.4.3 吸附特点
不受液体环境干扰。对于仿壁虎黏附材料和静电黏附材料而言,水、油等液体如果渗入黏附材料与黏附表面之间,会对摩擦系数、介电系数等造成显著影响,并可能对黏附材料本身造成破坏和污染,因而会影响黏附力的大小。但仿生湿黏附是模仿自然界中潮湿环境下的吸附进行设计,其一般利用弹性吸盘产生的压力差提供吸附力,吸盘与吸附表面之间形成的液膜反而有利于吸盘结构的密封[128],减少其受到液体环境的干扰。
容易发生侧向滑动。吸盘吸附结构的吸附力由内外压力差产生,其方向与吸附表面垂直,因此在光滑表面上单一的吸盘结构难以避免其侧向滑动。自然界中鮣鱼的吸盘内部带有密集排列的微刺,章鱼的吸盘内部有粗糙的髋臼状结构,这些结构可以有效增大摩擦、适应多种表面,研究和仿制此类结构可能会成为解决吸盘吸附侧向滑动问题的思路。
2 爬壁机器人的小型化设计参数—比黏附能密度
依据不同的黏附原理,近年来学者们设计出了多种多样的爬壁机器人,由于它们具有不同的设计目标,其性能参数也各不相同:一些用于维护核电站、焊接船体的机器人(如Brincadeira、REST等)需要在开阔空间内完成检测和维护工作,因而被设计成大体积、高负载以携带检修设备;一些用于侦查工作的机器人(如City Climber、tankbot[102]等)需要在楼房墙壁上作业,因而被设计成在平整表面上具有灵活的运动能力已完成在陡峭壁面之间的运动;而一些用于高端装备维护或灾难现场救援的机器人(如MicroTug[105]、HAMR-E[62]等)需要进入狭小空间完成搬运或勘察工作,因而被设计成尽可能小的体型以适应工作环境。显然目前对爬壁机器人的性能指标缺乏明确的标准,评价每种黏附机理的好坏,需要对相关机器人的体积、质量、黏附能力等参数进行综合考量。
黏附能密度(单位为J·m‒3)指将黏附在某一表面上单位体积的物体脱黏附所需要的能量,该物理量综合考量了爬壁机器人黏附强度与自身体积的影响,可以用于比较大型爬壁机器人与小型爬壁机器人黏附性能的优劣。如果考虑有效的黏附接触面积,黏附能密度的单位可以进一步化简为N/m‒2,即Pa,其物理意义表示在有效黏附面积上的总体负载(机器人自重加负载)。从机器人的设计需求角度出发,爬壁机器人需要携带多种功能性设备以完成多种任务,其质量越小,可负载的其他设备也就越多。由此,机器人的自身质量也成为了重要的影响因素。
比黏附能(单位为J·kg‒1)是指将黏附在某一表面上单位质量的物体脱黏附所需要的能量。这一物理量综合了机器人质量和黏附力的影响,让质量小、负载能力强的机器人在比较中具有更大的优势。但在狭小工作环境下执行任务时,爬壁机器人对设计尺寸具有较高的要求,显然此参数无法对机器人的尺寸进行考量,依旧存在局限性。
2016年,LABONTE等[129]通过对昆虫、爬行动物、两栖动物、蛛形纲以及哺乳类动物中具有爬壁能力的225个物种的黏附特性进行统计分析,探究了基于黏附原理爬壁所受到的尺寸限制。通过对225种具有爬壁能力的动物的相关数据进行对数线性回归计算以及最小二乘法求解,LABONTE等得出了黏附面积与自身质量、黏附强度与自身质量均存在幂数关系(前者幂数为1.02,后者为0.3)。基于以上结论可以发现,自然界中具有爬壁能力的生物,其黏附强度与自身质量的比值趋向于一个常量。这里黏附强度,与黏附能密度具有相同物理意义,单位相同为J·m‒3。
综上分析,在仿生黏附的启发下,考虑到黏附强度受自重、体积的影响,本文定义了一种适用于比较不同爬壁机器人黏附性能的评价参数:比黏附能密度γ(单位J·m‒3·kg‒1)。

式中,F为机器人的垂直负载能力(包括自重与最大负重),单位为N;S为机器人不同黏附机理的有效接触面积,单位为m2;m为机器人自身质量,单位为kg。比黏附能密度不仅可以实现对比分析基于不同黏附原理机器人的黏附性能,还可以用于指导爬壁机器人小型化设计的材料和结构优化。
综合考虑机器人的负载能力、黏附面积和自身质量,将几种不同黏附原理的爬壁机器人参数进行分析与整理,得到点阵图如图6所示。图中横坐标代表机器人自身的质量,横坐标值越小,则机器人质量越小;纵坐标为机器人最大负载与黏附面积的比值,纵坐标值越大,则机器人的黏附能力越强;纵坐标与横坐标的比值即为比黏附能密度,比黏附能密度越大,代表机器人的小型化程度越高,即该种黏附原理越适合设计小型化爬壁机器人。
图6中有五簇不同形状的点以及相应的椭圆形区域,代表了现阶段研究中不同黏附原理机器人的性能参数分布。磁吸附原理的机器人最早被应用于维护核电站,现在一般执行检查和维护大型船体、罐体等工作[130],由于需要在开阔空间携带多种设备并完成响应任务,此类机器人一般采用大体积、高负载的设计,因此其主要分布于图6的右上方。仿生湿黏附的机器人主要依靠仿章鱼或仿鮣鱼的吸盘完成吸附,由于吸盘结构的复杂性,现阶段设计出的机器人体型较大、黏附力相对较低,因此其主要分布于图6的右下方。真空负压吸附原理的爬壁机器人是最常见的爬壁机器人种类之一,通过提高负压源的工作功率,机器人可以获得强大的负载能力,但较大的能量消耗与大尺寸的吸附结构也让机器人的设计尺寸一般较大,因此其主要分布于图6的上方。静电黏附材料具有体积小、功耗低的特点,因此静电黏附原理的爬壁机器人往往具有较小的自身质量和尺寸,但因为静电黏附力受到多种环境因素的影响,其黏附能力较弱,因此此类机器人分布于图6的左下方。仿壁虎黏附材料具有较强的黏附强度与较高的黏附可控性,且黏附过程不需要额外供能,因此有利于机器人的小型化设计,在图6中分布于左上方。
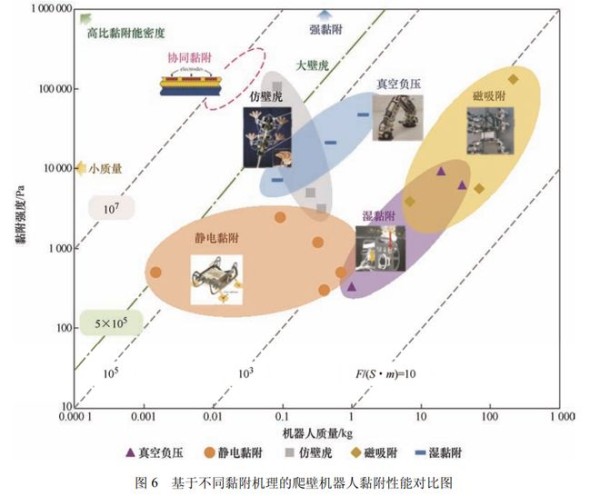
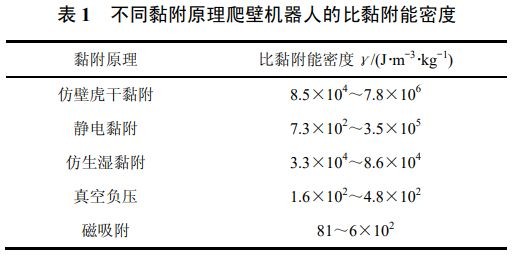
对自然的学习、模仿乃至超越一直是科学研究的重要方向,自然界中的大壁虎是目前已知最大的具有爬壁能力的动物,也是爬壁机器人的设计灵感来源之一,其平均质量约0.3 kg,脚掌黏附强度约100 kPa[71]。图6中加粗的点划线代表自然界中的大壁虎,其他灰色虚线为比黏附能密度的等值分布线,其将图表分割成比黏附能密度由低到高的几块区域。从图6中可以看出,不同黏附原理的爬壁机器人具有不同的比黏附能密度分布区间,统计得到的结果如表1所示。分析表1中数据可知,由仿壁虎黏附、仿生湿黏附和静电黏附三种黏附原理设计的爬壁机器人具有较高的黏附能量密度,因此这三种黏附原理更适用于机器人的小型化设计。
3 爬壁机器人的发展趋势
3.1 材料智能化:由传统结构材料向具有感知功能的智能材料发展
由于金属材料加工工艺较为成熟且具有优秀的力学特性,在早期的爬壁机器人设计中,机器人主要由金属材料制成,但同时金属材料密度高、柔韧性较差的缺点也让机器人在小型化设计时受到诸多局限。随着近年来新材料与新工艺的不断发展,人们对高分子材料和复合材料的研究也越来越深入。高分子材料(如硅橡胶、聚氨酯、亚克力、树脂等)由于具有塑性良好、密度低、韧性高以及耐腐蚀等优点,在爬壁机器人中可以作为黏附材料、自适应柔性机构等功能性材料,让机器人具有更好的黏附能力与更小的体型。智能材料由于具有优异的组合性能,有利于机器人的结构简化与小型化设计。目前越来越多的研究人员正从事智能材料的研究,它们的作用不再局限于结构性支撑,而是能感知外部刺激(热、光、电等)并做出响应,未来在机器人领域会有更广泛的应用。
3.2 驱动多样化:由电机驱动向多物理场驱动发展
电机驱动由于可控性强、输出功率大等优点,在早期的爬壁机器人领域有着较为广泛的应用。但随着爬壁机器人向着小体积、高灵活性发展,采用电机驱动的方式越来越难以满足机器人的设计要求。而近年来随着活性材料研究的不断深入,各种由电[131-132]、光[133-134]、热[135]、磁[136]、湿度[137]、化学驱动[138]以及气压[139-140]作为驱动的人工肌肉材料不断被设计出来,它们不仅有着较低的密度和较快的响应速度,其高能量密度的优点也非常有利于机器人的小型化设计。
3.3 体积小型化:由大体积高负载向小体积高负载比发展
爬壁机器人早期被应用于核电站、废墟等环境的探测与维护工作,由于需要携带多种设备且对机器人的体型没有限制,其往往采用大体积高负载的设计。随着科学技术的发展,人们对工作条件和生活质量的要求也越来越高,越来越多的领域需要机器人代替人工实现自动化。为了适应越来越复杂的工作环境,爬壁机器人需要小巧的体型和灵活的运动能力,因此小体积高负载比的爬壁机器人成为了目前研究的方向之一。
3.4 黏附机理协同化:由单一黏附原理向多种原理相协同发展
实现黏附的方式多种多样,但每种黏附材料都受限于其黏附机理,存在各自的问题。如仿壁虎黏附需要一定的预压力才能完成黏附过程,吸盘结构需要吸附表面平整,磁铁只能在铁磁性材料表面发挥作用等。单一的黏附方式难以应对多孔、粗糙、弯曲等多种较为复杂的表面且容易受到外界因素的影响,此时协同黏附则为黏附材料的研究提供了新的思路。目前的研究已经证实仿壁虎干黏附与静电黏附[141]、吸盘吸附与干黏附微结构[142-143]存在协同作用,通过结合多种黏附原理,协同黏附材料具有更强大的表面适应能力和黏附稳定性。
4 爬壁机器人在航空发动机检测领域的应用前景
航空发动机是一种高度复杂和精密的热力机械,也是飞机飞行的动力来源。它经常因高温、高压和高转速的工作环境而出现故障、危及飞行安 全[144]。航空发动机常见的故障有:裂纹、压痕、撕裂、凹陷、烧伤和腐蚀等[145]。目前,针对飞机的检测工作由于开展频繁且不能大范围拆装机体,致使检查效率较低,需要消耗大量人力。如果能够让微小型爬壁机器人进入航空发动机内部完成检测工作,则可以显著降低成本、提高效率。
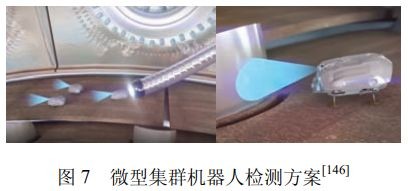
在2018年的范德堡罗航展上,英国航空发动机制造商罗罗公司(Rolls-Royce Plc)展示了一种通过小型“蟑螂”机器人在发动机内部爬行采集图片信息,实现快速检测的概念。如图7所示,爬壁机器人由连续体机器人送入发动机内部,穿过叶片间狭小的缝隙,在垂直和倒置的表面上移动并收集图像信息。
虽然目前微型爬壁机器人载荷能力较低、运动稳定性较差,但相关的研究和分析已经表明了其在航空发动机检测领域应用的可能性。通过改进机器人的机构设计、优化其运动规划,微型爬壁机器人将会适应越来越复杂的工作环境,从而拥有更为广阔的应用前景。
5 结论
爬壁机器人作为机器人研究的一个分支,可以在陡峭的壁面执行检测、维护等任务,特别是针对受限空间的特种检测领域展现出重要作用。随着对爬壁机器人研究的不断深入,学者们发现了如真空负压吸附、静电黏附、仿壁虎黏附、吸盘吸附等多种高效可控的黏附方式,其中大部分研究成果已经应用于爬壁机器人上并取得了良好效果。各种黏附方式都有着其独特的黏附特性,在机器人领域展现出广阔的应用前景。
然而,现有的爬壁机器人设计难以同时满足小体型、高负载、运动灵活的需求,在对黏附能力越来越高的需求下,目前的黏附方式也存在出其制备工艺复杂、小型化困难、黏附力不稳定等挑战,这些都限制了可控黏附与爬壁机器人研究的发展。针对爬壁机器人设计中小体积与高负载之间的矛盾,为解决多种爬壁机器人难以统一进行比较的问题,本文提出了比黏附能密度作为衡量爬壁机器人黏附能力的性能参数,明确了黏附性能评价准则与增强黏附的材料结构设计准则,为机器人的小型化设计提供了新的参考。
在未来的研究中,爬壁机器人的黏附材料设计不仅需要引入新材料、新工艺,更需要多种黏附机理的协同作用,充分发挥每种黏附机理各自的优势,使其具有更大的黏附强度、更高的黏附稳定性、以及更强的黏附可控性。
作 者:马吉良
责任编辑:赵子祎
责任校对:恽海艳
审 核:张 强
JME学院简介
JME学院是由《机械工程学报》编辑部2018年创建,以关注、陪伴青年学者成长为宗旨,努力探索学术传播服务新模式。
欢迎各位老师扫码添加小助理-暖暖为好友,由小助理拉入JME学院官方群!
欢迎关注JME学院视频号~
寻觅合作伙伴
有一种合作叫做真诚,有一种发展可以无限,有一种伙伴可以互利共赢,愿我们合作起来流连忘返,发展起来前景可观。关于论文推荐、团队介绍、图书出版、学术直播、招聘信息、会议推广等,请与我们联系。
感谢关注我们!《机械工程学报》编辑部将努力为您打造一个有态度、有深度、有温度的学术媒体!
版权声明:
本文为《机械工程学报》编辑部原创内容,欢迎转载,请联系授权!
在公众号后台留言需要转载的文章题目及要转载的公众号ID以获取授权!
联系人:暖暖
电话:010-88379909
E-mail:jme@cmes.org
网 址:http://www.cjmenet.com.cn
官方微信号:jmewechat
网址:爬壁机器人研究现状及发展趋势 https://www.yuejiaxmz.com/news/view/1215268
相关内容
中国家庭服务机器人行业市场现状及未来发展趋势研究报告.pdf中国日常生活用管家机器人行业市场现状及未来发展趋势研究报告.pdf
我国清扫车发展现状与设计趋势研究
木材防霉和防蓝变的研究现状及发展趋势
中国扫地机器人行业发展现状、市场驱动因素及发展趋势深度分析
语音识别国内外研究现状和发展趋势
2024年扫地机市场现状调研及行业发展趋势分析
2024扫地机器人行业市场发展现状及整体规模、未来趋势分析
2025年中国益智玩具产业发展现状调研及未来趋势预测
中国建筑装饰装修行业市场发展现状及前景趋势与投资分析研究报告(2024
随便看看
最新动态分享
- 好设计点亮居家生活!家装沙龙助力业主打造理想家园
- 居家生活设计意图怎么写
- 居家适老化设计:让父母的晚年生活,安全又有温度
- 居家软装布置生活美学设计
- 成都【麓湖生态城C17青鸾屿】售楼电话
- 第三单元 居家生活防意外教学设计
- 我的居家设计花园生活游戏下载
- 成都【银河天悦云境】售楼处电话(最新已核验) | 8月参考总价一览 | 在售主力户型 | 优惠活动详情 | 特价房源 | 楼盘信息更新
- 《2026小红书年度居住趋势》发布:居住方式进入“适我时代”
- Decor Life
热点动态分享
- 145140
- 52625
- 45165
- 42530
- 40973
- 30942
- 25791
- 25551
- 21949
- 18685

