陈根:智能交通第一步,无人驾驶解放双手
智能交通系统与无人驾驶的融合是科技进步的体现。 #生活知识# #生活感悟# #科技生活变迁# #无人驾驶技术#
文/陈根
无人驾驶曾经是科幻小说和电影的经典场景,是紧贴大地和生活的顶级技术工程,“艰难”和“颠覆”是无人驾驶无法逃避的两个命题。
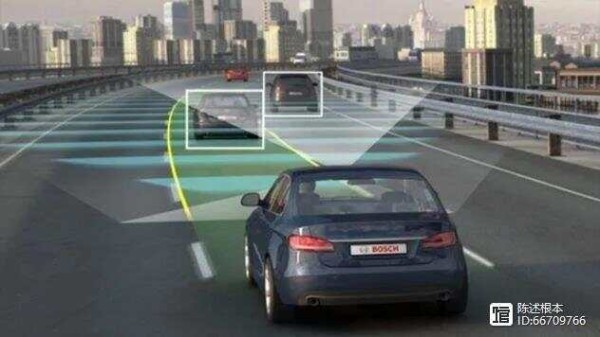
而很长时间以来,无人驾驶在技术上都面临着如何提高汽车视觉能力的难题。可以说,正是因为视觉识别技术的进步,无人驾驶汽车的发展才存在可能;也正是因为视觉识别技术的制约,无人驾驶技术的发展一直蹒跚不前。
2016年分别发生在美国和中国的两起特斯拉自动驾驶状态下的车祸致死事件,本质上就是由视觉识别技术的缺陷所致。
汽车实现智能自动化必须满足两个条件:其一,满足现实环境对无人驾驶汽车的要求。相比于智能手机,无人驾驶汽车面临的环境更为复杂,任何一个失误都可能关乎生命安全;其二,能够应对小概率事件,避免发生意外。
无人驾驶汽车与智能机器人的基本原理和社会环境基本相似。在机器人研究领域,机器人学家将这种只在1%时间内才发生的突发性小概率事件称之为 “极端事件(Corner Cases) ”。极端事件的不寻常之处在于,很少发生,但是一旦发生却可能导致灾难性后果。
5月8日,在自动驾驶权威数据集Semantic KITTI上,达摩院凭借全新算法在“单帧3D点云语义分割”排行榜获得第一。该技术用于达摩院的无人物流车后,大幅提升了车辆的环境精细化理解能力,使车辆能够识别“厘米级”障碍物。
KITTI数据集是全球最权威的自动驾驶计算机算法评测数据集,为促进基于激光的语义分割研究,KITTI推出了细分数据集Semantic KITTI。通过全类别分割平均交并比(mIOU)和整体准确率(accuracy)两大指标,考察参赛者的技术能力。达摩院团队在两项指标的评比中均拿下第一。
点云(Point Cloud)是拥有三维坐标、强度等信息的激光点的集合,是计算机视觉领域常用的三维数据表示方式。自动驾驶车辆通常借助激光雷达、摄像头、毫米波雷达等传感器识别环境信息。对于激光雷达获取的周围环境的3D点云,识别每个点的语义标签,就是“3D点云语义分割”。
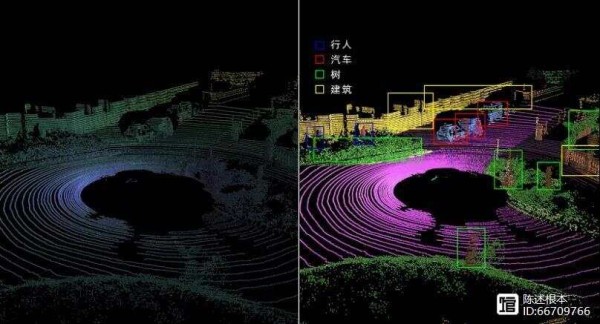
图左为原始点云,图右为经过语义分割的点云,自动驾驶车辆辨别出了行人、车辆、树木、建筑等物体。
除了行人、车辆等常规检测目标,道路周围的建筑、绿化、不明障碍物也会影响自动驾驶车辆的驾驶行为。3D点云语义分割技术的目标,便是帮助车辆更精细地理解道路环境。
达摩院自动驾驶实验室资深算法专家卿泉介绍,业界通用的点云局部上下文特征建模方法难以满足自动驾驶实时、精准的感知需求。达摩院提出的新算法以激光点为载体,结合每个3D点在鸟瞰、前视等视角下的邻域特征,通过多层级联编码进行特征学习,极大地增强了3D点的特征表示能力,由此提高了语义识别的准确性。
该算法应用于达摩院的无人物流车后,车辆对障碍物的精细化识别水平大幅提升。我们即将进入5G时代,5G网络提供了更高的传输速率、精准低时延控制和精准定位,可以大大提高无人驾驶技术的信息收集回传效率,从而实现车载与路侧感知的信息融合。这就降低了车载系统的计算复杂度,有效解决了车车、车路协同问题。
可以预见,智能交通协同发展将成为一种趋势,车辆的自主控制能力不断提高。完全自动驾驶终将实现,人和车的关系也终将被改变。
网址:陈根:智能交通第一步,无人驾驶解放双手 https://www.yuejiaxmz.com/news/view/336384
相关内容
自动驾驶功能将进一步升级 无人驾驶:智能汽车终极目标交通信号“绿波带”,城市交通迈向智能化的第一步
“智能驾驶”不是无人驾驶
自动驾驶——未来智能交通的畅想
无人驾驶如何安全驶入百姓生活 专家建议在道路交通安全法中增设“无人驾驶”专章
智能驾驶
智能驾驶是什么意思?智能驾驶系统介绍
无人驾驶汽车:驶向未来的智能之旅
通用自称的“超级智能驾驶辅助系统”到底是不是自动驾驶?
智能驾驶最新资讯
随便看看
最新动态分享
- 好设计点亮居家生活!家装沙龙助力业主打造理想家园
- 居家生活设计意图怎么写
- 居家适老化设计:让父母的晚年生活,安全又有温度
- 居家软装布置生活美学设计
- 成都【麓湖生态城C17青鸾屿】售楼电话
- 第三单元 居家生活防意外教学设计
- 我的居家设计花园生活游戏下载
- 成都【银河天悦云境】售楼处电话(最新已核验) | 8月参考总价一览 | 在售主力户型 | 优惠活动详情 | 特价房源 | 楼盘信息更新
- 《2026小红书年度居住趋势》发布:居住方式进入“适我时代”
- Decor Life
热点动态分享
- 145137
- 52583
- 45158
- 42521
- 40969
- 30939
- 25763
- 25549
- 21945
- 18676

