一种生活垃圾智能分类方法
科技让垃圾分类有了更智能的方式,如智能垃圾桶能识别并分类垃圾。 #生活知识# #生活感悟# #科技生活变迁# #智能生活#
1.本发明涉及垃圾分类技术领域,具体为一种生活垃圾智能分类方法。
背景技术:
2.垃圾回收是一个巨大的产业,垃圾的回收利用可为利废企业带来巨大利润,其价格可能翻了不止一倍。据不完整统计废品回收的均毛利率可达到50%以上。垃圾回收行业具有巨大的发展前景。
3.从2018年以来,中国多个城市开始推行倡导垃圾分类,但复杂的分类标准让大众难以进行正确的垃圾投放和处理,对生活垃圾的智能分类系统产生了巨大需求.
4.现有的垃圾智能分类系统,从分类对象上来看,可分为工业废品智能分类和生活垃圾分类,本专利主要面向生活垃圾分类。由于生活垃圾本身性质彼此差别较大,该类分类系统往往有价格昂贵、失误率高、识别速度慢以及满溢检测失效等问题,难以大规模应用。
5.在视觉识别过程中,由于外部光线变化等种种不可抗力,识别系统可能会失灵,导致分类过程出现故障甚至卡死,需要的人力维护成本极高。
技术实现要素:
6.本发明所解决的技术问题在于提供一种生活垃圾智能分类方法,以解决上述背景技术中提出的问题。
7.本发明所解决的技术问题采用以下技术方案来实现:一种生活垃圾智能分类方法,包括以下步骤:
8.步骤(1).通过分类箱体内的识别检测装置,获取垃圾类型并通过上位机发送信号;
9.步骤(2).识别检测装置控制分类箱体内的垃圾投放装置将垃圾投放到不同类型的垃圾桶内;
10.步骤(3).分类箱体内的识别检测装置进行多次检测垃圾高度取平均值实现满溢检测;
11.步骤(4).当识别检测装置获取的垃圾高度数据达到设定值时,发出满溢报警,垃圾桶由分类箱体下端开口被取出更换。
12.所述识别检测装置的垃圾类型识别:识别检测装置的上位机使用jetson nano实现图像处理,算法由深度学习的yolo3框架搭建,垃圾投放装置不断接收上位机传送的数据,区分不同垃圾类型,控制二维云台将垃圾投入对应的小垃圾筒内。
13.所述识别检测装置的满溢检测将激光测距模块放置在垃圾桶顶部,在二维云台将垃圾分类完成后,通过顶部的摇杆使激光测距模块旋转到对应小垃圾筒的上方,通过反馈的距离来确定当前垃圾桶的满载情况。
14.所述分类箱体内设有四个垃圾桶,所述分类箱体上端设有识别检测装置,所述分类箱体前端设有投放口,所述投放口内设有垃圾投放装置。
15.所述yolo3框架包括用于执行分类操作的表层函数、用于执行学习的隐藏层函数、用于加工学习结果并反馈给表层函数的输出层函数。
16.所述识别检测装置包括一个ui界面,并通过该界面进行更加形象的垃圾桶容量展示。
17.所述识别检测装置包括摄像头,所述摄像头安装在摄像头固定支架上,所述摄像头一侧设有激光测距仪,激光测距仪安装在激光测距仪支架上,所述激光测距仪支架、摄像头固定支架上通过螺栓m3
×
8安装在舵机法兰上,所述舵机法兰安装在舵机上,所述舵机连接于上位机,所述上位机连接有电源模块、控制模板、电源、显示屏,上位机、电源模块、控制模板、电源、显示屏安装在控制室隔板上的控制室内。
18.所述垃圾投放装置包括托盘,所述托盘安装在托盘支架上,所述托盘支架通过上舵机法兰安装在上舵机上,所述上舵机通过上舵机支架安装在下舵机法兰上,所述下舵机法兰安装在下舵机上,所述下舵机通过下舵机支架安装在分类箱体上。
19.所述分类箱体包括由若干立柱型材、横杆型材组成的框架,立柱型材、横杆型材之间通过角块、螺母m5、螺栓m5
×
10连接固定,框架外侧设有底板、左侧板、前侧板、右侧板、后侧板、盖板,底板、左侧板、前侧板、右侧板、后侧板、盖板通过螺母m5、螺栓m5
×
10安装在框架上。
20.与现有技术相比,本发明的有益效果是:本发明不断检测上位机的信号来提高分类效率。通过激光传感器测量垃圾满载,在桶上方进行多次检测,获取垃圾高度平均值来反映满溢状况。对串口通信协议进行了自定义,避免了传输过程中的丢包情况,使整个系统运行起来更加的稳定。电路采用了物理隔离单元化设计模式将数字地区和模拟地区区分开,两者互不干,减少了彼此间的相互影响。并对pcb进行了模块化设计,实现结构互洽。
21.ai识别基于深度学习设计,算法由yolo3框架搭建,将主程序分为三层,分别为执行垃圾分类命令的表层函数、通过垃圾分类结果进行深度学习的隐藏函数,以及将学习结果反馈到表层函数的输出函数,使垃圾的识别更加精准稳定,并使垃圾桶视觉识别逻辑的续航能力更强,能够适应时代发展对新型垃圾的分类需求。相对于现有的智能分类系统,该实现方案具有运行稳定、投放效率高、维护成本低、发展前景好的优势。
附图说明
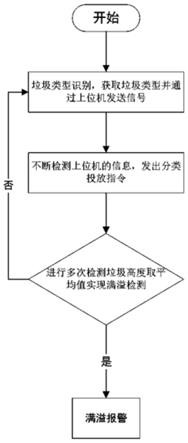
22.图1为本发明的方法流程示意图。
23.图2为本发明的主程序方法流程示意图。
24.图3为本发明的通信子程序流程示意图。
25.图4为本发明的二维云台分类子程流程示意图。
26.图5为本发明的满溢检测程序流程示意图。
27.图6为本发明的降压电路示意图。
28.图7为本发明的单片机最小系统电路示意图。
29.图8为本发明的舵机接口示意图。
30.图9为本发明的分类箱体爆炸图示意图。
31.图10为本发明的yolov3 416模型结构示意图。
32.图11为本发明的主视图示意图。
33.图12为图11的aa向剖视图。
34.图13为图11的bb向剖视图。
35.图中:1、立柱型材;2、横杆型材;3、角块;4、螺母m5;5、螺栓m5
×
10;6、底板;7、垃圾桶;8、下舵机;9、下舵机支架;10、下舵机法兰;11、上舵机;12、上舵机支架;13、上舵机法兰;14、托盘支架;15、托盘;16、左侧板;17、前侧板;18、右侧板;19、后侧板;20、摄像头;21、摄像头固定支架;22、螺栓m3
×
8;23、舵机法兰;24、激光测距仪支架;25、激光测距仪;26、舵机;27、控制室隔板;28、上位机;29、电源模块;30、控制模板;31、电源;32、盖板;33、显示屏。
具体实施方式
36.为了使本发明的实现技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体图示,进一步阐述本发明,在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以两个元件内部的连通。
37.实施例1
38.如图1~8所示,一种生活垃圾智能分类方法,包括以下步骤:
39.步骤(1).通过分类箱体内的识别检测装置,获取垃圾类型并通过上位机发送信号;
40.步骤(2).识别检测装置控制分类箱体内的垃圾投放装置将垃圾投放到不同类型的垃圾桶内;
41.步骤(3).分类箱体内的识别检测装置进行多次检测垃圾高度取平均值实现满溢检测;
42.步骤(4).当识别检测装置获取的垃圾高度数据达到设定值时,发出满溢报警,垃圾桶由分类箱体下端开口被取出更换。
43.所述识别检测装置的垃圾类型识别:识别检测装置的上位机使用jetson nano实现图像处理,算法由深度学习的yolo3框架搭建,垃圾投放装置不断接收上位机传送的数据,区分不同垃圾类型,控制二维云台将垃圾投入对应的小垃圾筒内。所述识别检测装置的满溢检测将激光测距模块放置在垃圾桶顶部,在二维云台将垃圾分类完成后,通过顶部的摇杆使激光测距模块旋转到对应小垃圾筒的上方,通过反馈的距离来确定当前垃圾桶的满载情况。所述yolo3框架包括用于执行分类操作的表层函数、用于执行学习的隐藏层函数、用于加工学习结果并反馈给表层函数的输出层函数。所述识别检测装置包括一个ui界面,并通过该界面进行更加形象的垃圾桶容量展示。
44.主控选择一块stm32f103c8t6,其运算速度快、有丰富的外设、价格适中、封装小。为了精确将垃圾投入到对应的垃圾桶,本方案采用了两个1501数字舵机组成二维云台,其可控角度180度,线性度好,精准控制。为了满足测量垃圾桶满载的情况,选用tf-luna激光雷达测距传感器,分辨力高,探测范围大,探测精度高。同时,选择了270度的3115数字舵机作为摇杆的旋转动力,可控范围能够覆盖4个垃圾桶,精准的去帮助测距。电源选择11.1v的3s航模电池,为防止电机工作过程中电压跌落,选用放电能力强的25c电池.稳压使用lm2596s和1ams1117,将舵机和控制电路分开供电,防止舵机转动时影响控制电路供电。
45.其中:
46.(1)主程序:主程序为分类垃圾桶的基本业务逻辑,等待垃圾投入、通信获取垃圾类型、
47.二维云台分类、满溢检测、二位云台复位依次执行即可完成垃圾分类和满溢检测的任务。
48.(2)通信主程序:下位机stm32和上位机jetson nano通过串口交换数据,上位机传输识别到的
49.垃圾类型,下位机传输垃圾桶的满载状况,通过设置标志位的;类型来决定当前是接收还是发送状态。
50.(3)二维云台分类子程序:垃圾桶的分类通过水平轴和俯仰轴的舵机实现垃圾的分类和投放。
51.(4)满溢检测程序:通过控制垃圾桶顶部的摇杆机构,改变垃圾桶的顶部激光传感器位置,通过该传感器检测各垃圾桶的溢满状况。
52.主控单元由dc/dc降压电路、单片机最小系统电路、舵机接口、激光测距模块接口、按键接口、串口接口和swd接口、oled接口。以下为各个模块的功能介绍:
53.(1)dc/dc降压电路:电源为12v输入,此处为11.1v锂电池接口,ic1为lm2596-5.0,输出5v(用于舵机、红外测距、串口通信、oled)ams1117-3.3,输出3.3v(用于mcu、adc);(2)单片机最小系统:以stm32f103c8t6为核心的单片机控制最小系统;(3)串口2:用于上位机与下位机间的通信;(4)串口3:用于检测垃圾桶满溢情况;(5)舵机接口:连接二维云台的舵机,连接控制摇杆的270度舵机;(6)swd接口:用于单片机程序调试与下载;(7)oled接口:便于观察调试。(8)按键:用户自定义;(9)电源指示灯、led灯:上电提示、负载(10)扩展io:用与添加其他外设。
54.电路秉承可靠性高、成本低廉、利于量产的原则进行设计。在保证工作稳定的前提下,芯片选用常用的国产型号,极大地降低成本和采购难度。电路板上元器件摆放的位置和角度都利于贴片机贴装,布线时不在焊盘上过孔,防止过回流时锡膏流入过孔造成虚焊,从而提高生产质量,将所有的元器集成到一块pcb底板上。
55.采用物理隔离单元化设计模式将数字地和模拟地区分开,两者互不干扰,减少了数字电路和模拟电路之间的相互影响。同时,将电源电路和信号电路区分开,能够减小电路信号受到的干扰。在电源上用到了很多的滤波电容,保障了我们使用的直流电源。
56.接口按接线最短原则设计,减少了电线的成本;pcb模块化设计,结构互洽。满载检测:满载装置用于检测垃圾桶内的垃圾是否超过整体容积的75%,需要有较强的准确性及持续工作能力,因此采用悬臂结构,由270度舵机带动悬臂在垃圾桶上方旋转,进行全方位的扫描,检测到垃圾桶的每一个角落。ai识别:基于深度学习来进行垃圾的识别。通过边缘计算终端来处理摄像头数据,使效果更加的明显,识别更加的精准。
57.实施例2
58.如图1、图9所示,一种生活垃圾智能分类方法,包括以下步骤:
59.步骤(1).通过分类箱体内的识别检测装置,获取垃圾类型并通过上位机发送信号;
60.步骤(2).识别检测装置控制分类箱体内的垃圾投放装置将垃圾投放到不同类型
的垃圾桶内;
61.步骤(3).分类箱体内的识别检测装置进行多次检测垃圾高度取平均值实现满溢检测;
62.步骤(4).当识别检测装置获取的垃圾高度数据达到设定值时,发出满溢报警,垃圾桶由分类箱体下端开口被取出更换。
63.所述分类箱体内设有四个垃圾桶7,所述分类箱体上端设有识别检测装置,所述分类箱体前端设有投放口,所述投放口内设有垃圾投放装置。
64.所述识别检测装置包括摄像头20,所述摄像头20安装在摄像头固定支架21上,所述摄像头20一侧设有激光测距仪25,激光测距仪25安装在激光测距仪支架24上,所述激光测距仪支架24、摄像头固定支架21上通过螺栓m3
×
822安装在舵机法兰23上,所述舵机法兰23安装在舵机26上,所述舵机26连接于上位机28,所述上位机28连接有电源模块29、控制模板30、电源31、显示屏33,上位机28、电源模块29、控制模板30、电源31、显示屏33安装在控制室隔板27上的控制室内。
65.所述垃圾投放装置包括托盘15,所述托盘15安装在托盘支架14上,所述托盘支架14通过上舵机法兰13安装在上舵机11上,所述上舵机11通过上舵机支架12安装在下舵机法兰10上,所述下舵机法兰10安装在下舵机8上,所述下舵机8通过下舵机支架9安装在分类箱体上。
66.所述分类箱体包括由若干立柱型材1、横杆型材2组成的框架,立柱型材1、横杆型材2之间通过角块3、螺母m54、螺栓m5
×
105连接固定,框架外侧设有底板6、左侧板16、前侧板17、右侧板18、后侧板19、盖板32,底板6、左侧板16、前侧板17、右侧板18、后侧板19、盖板32通过螺母m54、螺栓m5
×
105安装在框架上。
67.yolov3结构的运行特点为,首先从数据集构建fpn特征金字塔进行加强特征提取:对检测目标进行检测,提取出三个特征层,再利用这三个特征层进行fpn层的构建;其次,再利用yolo head获得预测结果,通过利用fpn特征金字塔,我们可以获得三个加强特征,并利用这三个特征层传入yolo head获得预测结果;得到最终的预测结果后,再进行得分排序与非极大抑制筛选,得出结果。
68.以上显示和描述了本发明的基本原理和主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明的要求保护范围由所附的权利要求书及其等效物界定。
网址:一种生活垃圾智能分类方法 https://www.yuejiaxmz.com/news/view/897910
相关内容
一种生活垃圾智能分类装置智能分类垃圾桶——垃圾分类更方便
一种智能生活垃圾分类系统的破袋装置的制作方法
智能垃圾分类
智能垃圾分类箱——科技让垃圾分类“智能化”
智能垃圾分类箱:垃圾分类智能化,环保更轻松
智能分类垃圾箱
智能生活垃圾检测与分类系统:开启垃圾分类新时代
一种生活垃圾自动分类机的制作方法
【智能垃圾分类】智能垃圾箱让生活垃圾落到实处
随便看看
最新动态分享
- 家庭消毒不用愁!5大物理消毒法守护健康生活
- カビをアルコール退治|消毒用エタノールでの除菌方法やNG使用法も
- 消毒产品目录
- 基于STM32的智能鞋柜控制系统设计与实现
- 【解決】家具に生えたカビの取り方、予防法、原因を紹介
- 抗菌实验不同操作方法及细节对试验结果的影响
- 多部门推动物联网创新发展 到2028年这些技术要突破
- 生活区节水节电节能管控措施.docx
- 家庭节约用电有哪些具体方法?
- 北京市出台碳普惠管理办法 市民低碳行为将能“变现”
热点动态分享
- 145110
- 52407
- 45122
- 42497
- 40934
- 30915
- 25708
- 25536
- 21924
- 18629

