自动化毕设 基于单片机的太阳追光系统(源码+硬件+论文)
采用太阳能热水器和光伏发电系统,自给自足绿色能源 #生活常识# #环保节能技巧# #节能建筑设计#
文章目录 0 前言1 课题介绍光线追踪的原理系统架构 2 硬件设计3 核心软件设计4 实现效果5 最后0 前言
这两年开始毕业设计和毕业答辩的要求和难度不断提升,传统的毕设题目缺少创新和亮点,往往达不到毕业答辩的要求,这两年不断有学弟学妹告诉学长自己做的项目系统达不到老师的要求。
为了大家能够顺利以及最少的精力通过毕设,学长分享优质毕业设计项目,今天要分享的是
毕业设计 基于单片机的太阳追光系统(源码+硬件+论文)
学长这里给一个题目综合评分(每项满分5分)
难度系数:3分工作量:3分创新点:4分项目分享:见文末!
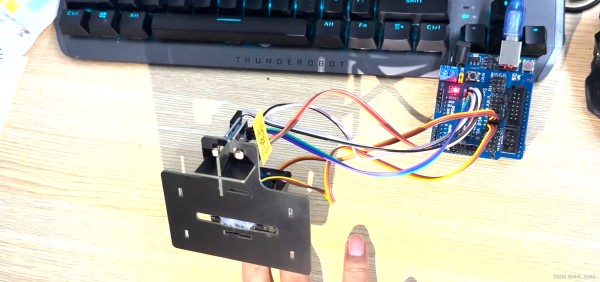
实物演示效果
毕业设计 基于单片机的太阳追光系统 - 嵌入式 物联网
1 课题介绍
基于Arduino Uno单片机的太阳能追踪系统的研究受到了人们的广泛关注。许多研究者通过改进系统控制算法、采用优质的光敏电阻、集成先进的传感器和精密电机等方式,不断提高系统的性能和精度,丰富了太阳能追踪系统的研究内容和研究方向。太阳能追踪系统的研究与应用是为了更好地利用太阳能这种可再生能源,提高太阳能转换效率,减少污染排放,缓解能源危机,这些都是当前人们迫切需要解决的问题。因此,基于Arduino Uno单片机的太阳能追踪系统研究具有很高的实用性和发展前景。
光线追踪的原理
基于Arduino Uno单片机的太阳能追踪系统,其基本原理是根据太阳位置变化实现太阳能电池板的追踪,以提高太阳能转换效率。具体原理如下:
光敏电阻检测太阳位置:通过光敏电阻检测太阳的位置,实时反馈太阳位置数据。获取太阳运行轨迹:基于太阳位置变化,获取太阳在天空中的运行轨迹,并将其转化为相应的运动学参数。控制舵机:通过Arduino Uno单片机控制步进电机搭载太阳能电池板来运动,接近太阳的实际位置。PID控制算法:Arduino Uno单片机采用PID控制算法控制舵机,对太阳能电池板进行精确修正。自动调整:系统可按照设定的参数自动调整太阳能电池板的角度,使之始终正对太阳,以实现最大化能量转换。综上所述,基于Arduino Uno单片机的太阳能追踪系统,通过对太阳的位置变化进行检测和不断调整太阳能电池板的角度,从而实现了太阳能追踪的过程。该系统采用PID控制算法,具有自动调整的功能,可在太阳运行轨迹发生变化的情况下进行精确定位。这种系统具有稳定性高、自动调整能力强等特点,可大幅提高太阳能转换效率。
系统架构
本系统设计通过光照检测,最终达到系统能自动识别光照方向,实现自动调整,始终跟踪太阳光,至于加载高性能的太阳能电池板对系统进行供电,暂时不作扩充,但是本设计的最终目的在于配合太阳能电池板的使用,提高光能的使用效率。以下是总体框架图:

测光系统由四只光敏电阻组成,四只光敏电阻分别放在正四面体的四个面上,通过分压之后接入单片机的 A/D 端口,光敏电阻在暗光条件下,阻值在几百千欧或者几兆欧,而在光照条件下阻值降到几千欧,当系统复位后,接收光照的光敏电阻阻值下降,使端口呈现接地,电路使用的是 100K 的电阻与光敏电阻串联后接地,通过对 A/D 采样值的比较及对控制算法的设计,可以调整到最终四个光敏电阻均对太阳光方向,从而实现太阳光跟踪。
2 硬件设计
光敏电阻的原理:光敏电阻是一种依据外界光线照射强度变化而变化电阻值的半导体元器件。其原理是通过一个光敏材料(如硒、硫化铟等)吸收光的能量,使其导电性能发生变化,进而改变其电阻值。
在此次基于Arduino Uno单片机太阳能追踪系统中,光敏电阻可以用来检测周围环境的光线强度。它的基本工作原理是当光照射在电阻上时,电阻的电阻值会发生变化。因此,本次设计中我利用光敏电阻的特性来实现光线强度的测量。
在具体的实现过程中,我将一个光敏电阻连接到Arduino Uno的模拟输入引脚上,并使用analogRead()函数读取该引脚的模拟值。通过将模拟值转换为电压值,并根据光敏电阻的特性曲线进行校准,我们就可以得到当前环境下的光线强度值。
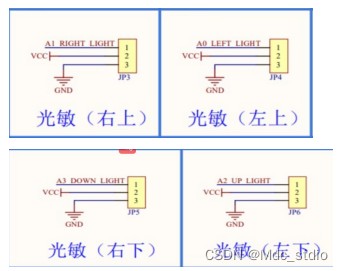
在太阳能追踪系统中,通过不断测量周围环境的光照强度,我们可以判断太阳的位置,并控制舵机的运动,使其驱动太阳能板转向太阳,以获取最大的光能收集效率。下面是此设计中光敏电阻连接原理图:

3 核心软件设计
1)初始化程序:在程序开始时,需要初始化与舵机、传感器和其他外设相关的引脚和变量。
2)光敏电阻检测:通过光敏电阻检测太阳位置,获取太阳位置数据,并将读取到的数据存储在变量中,并将其反馈至Arduino Uno单片机进行分析处理。
3)控制舵机并计算舵机角度:将计算得到的舵机角度发送到舵机控制器,使其旋转舵机。根据传感器数据计算出舵机应该旋转的角度。这通常涉及使用三角函数计算太阳的高度和方位角度,并将这些值转换为舵机需要的角度。
4)PID控制算法:采用PID控制算法实现太阳能电池板的追踪,控制太阳能电池板的角度,实时校正角度误差,让太阳能电池板始终对准太阳。
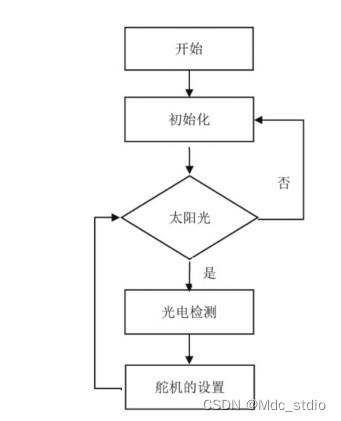
以下是太阳能追踪系统软件设计流程图:
初始化程序
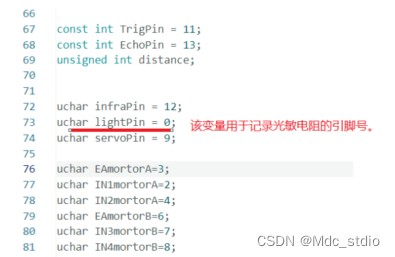
在程序开始时,需要初始化与舵机、传感器和其他外设相关的引脚和变量。程序设计如图所示:
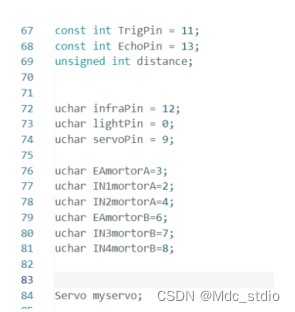
const int TrigPin = 11; const int EchoPin = 13; 这两行定义了传感器的引脚号,TrigPin是发送的引脚,EchoPin是接收返回信号的引脚。 uchar:这表示无符号字符类型,其中uchar infraPin、uchar lightPin、uchar servoPin、uchar EAmortorA、uchar IN1mortorA、uchar IN2mortorA、uchar EAmortorB、uchar IN3mortorB、uchar IN4mortorB分别代表9个引脚编号。 infraPin = 12:将数字12赋值给infraPin变量,该变量用于记录红外传感器的引脚号。 lightPin = 0:将数字0赋值给lightPin变量,该变量用于记录光敏电阻的引脚号。 servoPin = 9:将数字9赋值给servoPin变量,该变量用于记录舵机的引脚号。 EAmortorA=3:将数字3赋值给EAmortorA变量,该变量用于记录电机A的使能引脚号。 IN1mortorA=2:将数字2赋值给IN1mortorA变量,该变量用于记录电机A的输入1引脚号。 IN2mortorA=4:将数字4赋值给IN2mortorA变量,该变量用于记录电机A的输入2引脚号。 EAmortorB=6:将数字6赋值给EAmortorB变量,该变量用于记录电机B的使能引脚号。 IN3mortorB=7:将数字7赋值给IN3mortorB变量,该变量用于记录电机B的输入3引脚号。 IN4mortorB=8:将数字8赋值给IN4mortorB变量,该变量用于记录电机B的输入4引脚号。 Servo myservo:定义了一个名为myservo的Servo对象,可以使用Arduino内置库函数对它进行控制。 123456789101112
光敏电阻检测
在基于Arduino Uno单片机的太阳能追踪系统中,光敏电阻的检测是非常重要的。通过光敏电阻检测太阳位置,获取太阳位置数据,并将其反馈至Arduino Uno单片机进行分析处理。以下是实现光敏电阻检测的软件设计步骤:
步骤1:硬件连接
首先,将光敏电阻连接到Arduino Uno板上的模拟引脚A0上并连接一个10K欧姆的限流电阻。
步骤2:定义变量
在程序顶部,声明所需的变量。变量lightPin用于存储光敏电阻的模拟引脚号。
执行一次初始化
在setup()函数中,执行一次初始化。
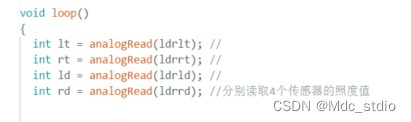
在loop()函数中,使用analogRead()函数读取模拟引脚A0上的亮度值。读取4个光敏电阻(ldrlt, ldrrt, ldrld, ldrrd)的模拟输入值,存储在4个整型变量中(lt, rt, ld, rd)由于光敏电阻的电阻值与光线强度成反比例关系,因此可以将读取的亮度值转换为光强度值,以便后续使用。
控制舵机并计算舵机角度

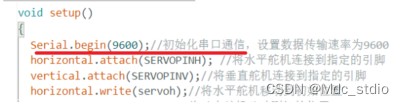
使用"attach"函数分别连接了两个舵机,即水平方向的舵机和垂直方向的舵机,并将它们的初始位置都设置为变量"servoh"和"servov"所代表的值。接着使用"delay"函数延时100毫秒,然后将垂直方向的舵机转动至"servovLimitLow"和"servovLimitHigh"两个极限角度的平均值,并再次延时100毫秒。最后将水平方向的舵机转动至"servohLimitHigh"和"servohLimitLow"两个极限角度的平均值,完成了初始化设置。

以下是对初始化的详细解释: horizontal.attach(SERVOPINH); 将水平舵机连接到指定的引脚(通过常量SERVOPINH定义)。 vertical.attach(SERVOPINV); - 将垂直舵机连接到指定的引脚(通过常量SERVOPINV定义)。 horizontal.write(servoh); - 将水平舵机移动到初始位置(通过变量servoh定义)。 vertical.write(servov); - 将垂直舵机移动到初始位置(通过变量servov定义)。 delay(100); - 延迟100毫秒,等待舵机运动到初始位置。 vertical.write((servovLimitLow + servovLimitHigh)/2); - 将垂直舵机移动到中间位置(通过变量servovLimitLow和servovLimitHigh定义)。 delay(100); - 延迟100毫秒,等待垂直舵机运动到中间位置。 horizontal.write((servohLimitHigh + servohLimitLow)/2); - 将水平舵机移动到中间位置(通过变量servohLimitLow和servohLimitHigh定义)。 注:在上述代码中,SERVOPINH、SERVOPINV、servoh、servov、servovLimitLow和servovLimitHigh是变量或常量的名称,在程序开始已经对以上变量进行了定义。 ③在loop()函数中对舵机角度进行了计算。 1234567891011
篇幅有限,不过多复述详细设计细节,详细的设计分享在论文中。。。
4 实现效果

演示效果视频
毕业设计 基于单片机的太阳追光系统 - 嵌入式 物联网
5 最后
包含内容
详细配套论文
项目分享:见文末!
网址:自动化毕设 基于单片机的太阳追光系统(源码+硬件+论文) https://www.yuejiaxmz.com/news/view/938245
相关内容
flask基于SpringBoot框架的阳光二手书籍管理系统(毕设源码+论文)基于51单片机的智能照明控制系统设计(本科)毕业论文中期报告.doc全文
基于STC89C52单片机的智能灯光毕业设计论文
2023年毕业设计【基于单片机的智能鞋柜设计】有源代码和系统
STM32毕业设计——基于STM32+MQTT+WiFi技术的智能家居系统设计与实现(毕业论文+程序源码)——智能家居系统
基于开源硬件的家庭自动化系统设计
【计算机毕设论文】基于SpringBoot图片热量估计系统
ssm毕设 健康生活运动咨询系统源码+程序+论文
基于51单片机的智能扫地车系统设计(源码+仿真+论文)
毕业设计论文基于单片机的工业生产节能时控器设计
随便看看
最新动态分享
- 适合搭配的食材
- 食疗养生大全:67种天然食材搭配与食疗方,吃出健康好气色
- 哪些食材可以搭配食用 十对最佳食材搭配好吃又健康
- 壮阳补肾煲汤大全:中药配方与食材搭配全解析
- 广东鱼肚汤的家常做法大全|营养功效+食材搭配+5种经典汤谱(附详细步骤)
- 四季美容养颜豆浆配方大全|天然食材搭配+科学原理,喝出透亮肌
- 零失败家常小炒菜谱大全(附新手必学技巧+食材搭配指南)
- 补肾食谱大全:10种家常食疗方+食材清单,科学搭配提升肾动力
- 5种营养搭配!家常鸡汤快手做法大全(附不同做法+食材禁忌)
- 麻辣香锅食材菜单大全图
热点动态分享
- 144501
- 46936
- 44545
- 40241
- 39352
- 30409
- 25014
- 24793
- 21308
- 18179

