水面垃圾快速打捞的清理方法与流程
快速清理厨房垃圾,一键式垃圾桶设计 #生活知识# #生活感悟# #居家生活# #懒人生活秘籍#
本发明涉及垃圾回收领域,具体涉及一种水面垃圾打捞方法。
背景技术:
随着社会不断进步发展,人们的生活水平不断提高,人们开始注重生活质量,定期出去旅游成为常态,使得旅游景点的游客量暴增,同时这也带来了一定的负面影响,例如垃圾残留问题,其中水面垃圾因不易打捞回收而更为严重,不仅破坏了环境,还给水资源带来了威胁,我国水面垃圾打捞多以人工为主,大量危险而繁琐的水面清理工作需要人来完成,人工清理垃圾的方式效率低下且劳动强度太大,为此,本发明人设计了一种水面垃圾打捞设备,其整个水面垃圾收集过程通过操作人员在岸上进行操控,无需操作人员下水,大大降低了操作人员的劳动强度并提高打捞效率,且一次下水能够打捞收集的垃圾更多。
技术实现要素:
为解决现有技术的不足,本发明的目的是提供一种水面垃圾打捞方法,其整个水面垃圾收集过程通过操作人员在岸上进行操控,无需操作人员下水,大大降低了操作人员的劳动强度并提高打捞效率,且一次下水能够打捞收集的垃圾更多。
为实现上述技术目的,本发明所采用的技术方案如下。
水面垃圾快速打捞的清理方法,其步骤在于:
s1:前进装置中的动力机构运行;
所述的前进装置包括主架体、前进机构、垃圾储存仓、动力机构,前进机构包括可漂浮于水面且呈圆柱体结构的浮体、位于水面下方的前进构件,浮体与主架体之间设置有固定套圈且浮体通过固定套圈固定安装于主架体上,前进机构设置有两组并分别为安装于主架体的一侧;
所述的主架体上设置有引导方向垂直于水面的导向杆,垃圾储存仓的侧面设置有套接凸起且套接凸起活动套接于导向杆外部并构成滑动导向配合,垃圾储存仓漂浮于水面且其位于两组前进机构之间;
所述的动力机构包括发动机、中间轴、导向柱、动力轴、安装支架、往复件,发动机固定于主架体上,中间轴轴向平行于两组前进机构之间的距离方向,中间轴活动安装于主架体上并可绕自身轴向转动,动力轴/导向柱的轴向均平行于两组前进机构之间的距离方向且两者均固定于主架体上、并且两者均位于两组前进机构之间,动力轴的外圆面还设置有长度与动力轴长度一致的外花键一,发动机动力输出端与中间轴之间设置有动力传递件一且两者之间通过动力传递件一进行动力连接传递,中间轴与动力轴之间设置有动力传递件二且两者之间通过动力传递件二进行动力连接传递,动力传递件一/二均为带传动结构,安装支架活动安装于导向柱外部并构成滑动导向配合;
发动机运行并通过动力传递件一、中间轴、动力传递件二牵引动力轴绕自身轴向转动;
s2:垃圾打捞装置运行;
所述的垃圾打捞装置位于安装支架背离垃圾储存仓的一侧,垃圾打捞装置包括连接支架、打捞件、垃圾推送机构,连接支架固定于安装支架上且打捞件与垃圾推送机构均安装于连接支架上,打捞件包括转筒、舀斗,转筒为两端开口且轴向平行于动力轴轴向的圆筒结构,转筒活动安装于连接支架上并可绕自身轴向转动,舀斗固定于转筒的外圆面且舀斗沿转筒的圆周方向阵列设置有若干组,并且当转筒绕自身轴向转动时,舀斗同步转动并可打捞水面垃圾,舀斗与转筒之间的固定处还开设有用于供舀斗内的水面垃圾掉落至转筒内的通孔,通孔处匹配铰接有可封闭/打开通孔的磁性封板,舀斗为铁磁性材料制成并可吸引磁性封板将通孔封闭;
所述的垃圾推送机构包括动力传递构件、驱动构件、推送构件、设置于转筒内的搅碎构件,动力传递构件用于动力轴与转筒之间的动力连接传递,推送构件用于推动搅碎构件沿转筒轴向运动并将转筒内的垃圾推送至垃圾输送装置内,搅碎构件用于对垃圾中的树枝等进行搅碎处理,驱动构件用于驱动搅碎构件进行搅碎运行;
动力轴转动并通过动力传递构件驱使转筒绕自身轴向转动,转筒转动并牵引舀斗同步转动,舀斗转动过程中会将水面垃圾舀至自身内部,随后在舀斗继续转动过程中,垃圾的重力会使磁性封板打开设置于舀斗与转筒之间固定处的通孔,从而使垃圾掉落至转筒内,掉落完毕后,磁性封板在磁性作用下重新被舀斗吸引并封闭通孔,其中部分水会随垃圾一同被舀至转筒内;
s3:动力传递构件在将动力轴的动力传递至转筒的同时,动力传递构件还将动力轴的动力传递至驱动构件并使其运行,驱动构件运行并驱使搅碎构件进行搅碎运行并最终对垃圾中的树枝等进行搅碎处理;
当转筒内储存满垃圾后,打捞件停止运行,同时推送构件运行并推送搅碎构件沿转筒的轴向运动,从而可将转筒内的垃圾由转筒出料端推送出去;
s4:所述的垃圾输送装置位于垃圾储存仓与转筒出料端之间,垃圾输送装置包括固定支架、输送机构、动力传递机构,固定支架固定安装于安装支架上且输送机构、动力传递机构均安装于固定支架上,输送机构用于接收由转筒出料端输出的垃圾并将其运输至垃圾储存仓内,动力传递机构用于接收动力轴转动产生的动力并将其传递至输送机构;
所述的转筒的出料端与输送机构的进料端之间设置有输送管道,输送管道的一端与转筒出料端连接接通、另一端位于输送机构的进料端上方,输送机构的卸料端位于垃圾储存仓的上方,转筒的出料端高于输送机构的进料端并使输送管道呈倾斜布置;
垃圾与水经转筒出料端被一同推送至输送管道内并最终经输送管道输送至输送机构的进料端后,输送机构运行并将垃圾输送至垃圾储存仓内且垃圾中的水会被沥出,同时打捞件继续运行;
s5:所述的往复件包括往复电机、滑轮、拉绳,滑轮的轴向平行于浮体轴向且滑轮活动安装于主架体上并可绕自身轴向转动,滑轮设置有两组并分别位于动力轴沿自身轴向的一侧,往复电机固定于主架体上且其输出轴轴向平行于浮体轴向,往复电机的动力输出端与一组滑轮之间同轴固定连接,拉绳的首端绕过两组滑轮后与拉绳的首端固定连接并构成闭合环形回路,安装支架与拉绳之间固定连接;
上述垃圾打捞过程中,往复电机运行并通过拉绳牵引安装支架沿导向柱的引导方向进行往复滑移,安装支架往复滑移并牵引垃圾打捞装置/垃圾输送装置同步往复滑移,通过垃圾打捞装置/垃圾输送装置同步往复滑移以及两者配合对垃圾的打捞,从而完成对本设备经过的水面的垃圾打捞处理;
s6:前进构件运行并可牵引本设备前进并对其余水面进行垃圾打捞,其中只需改变两组前进构件的转速并使其形成有转速差即可完成转向。
作为本技术方案的进一步改进。
所述的前进构件包括固定外壳、前进电机、涡轮,固定外壳为两端开口且轴向平行于浮体轴向的圆筒结构,固定外壳固定于浮体上且固定外壳位于浮体的正下方,前进电机同轴固定于固定外壳内,涡轮同轴固定于前进电机的动力输出端,固定外壳沿涡轮前进方向的前进端匹配安装有过滤罩;
所述的主架体上还固定有发电机,发电机与发动机同轴布置且发电机与动力传递件一的主动带轮之间同轴固定连接,发电机用于为本设备中的电机运行提供电力。
作为本技术方案的进一步改进。
所述的动力传递构件包括罩壳、传递轴、固定筒,罩壳固定于连接支架上且转筒的一开口端为固定端且该端伸入至罩壳内、另一开口端为出料端,传递轴轴向平行于动力轴轴向,传递轴活动安装于连接支架上并可绕自身轴向转动,且传递轴的动力输出端伸入至罩壳内,固定筒为两端开口且与转筒同轴布置的圆环体结构,固定筒通过轴承安装于罩壳内且固定筒与转筒固定端之间固定连接;
所述的传递轴的动力输入端与动力轴之间设置有动力传递件三且两者之间通过动力传递件三进行动力连接传递,动力传递件三为带传动结构,动力传递件三的主动带轮上设置有与设置于动力轴外圆面的外花键一相匹配的内花键一,且动力传递件三的主动带轮通过内花键一安装于动力轴外部,并且当动力传递件三的主动带轮沿动力轴的轴向发生位移时,动力轴通过外花键一与内花键一的配合持续向动力传递件三的主动带轮输出动力,动力传递件三的主动带轮还与安装支架之间以卡接方式连接,安装支架沿导向柱的引导方向滑移并牵引动力传递件三的主动带轮同步滑移;
所述的传递轴的动力输出端与固定筒的外圆面之间设置有动力传递件四且两者之间通过动力传递件四进行动力传递,动力传递件四为齿轮齿圈结构。
作为本技术方案的进一步改进。
所述的驱动构件包括驱动件、转轴,驱动件位于固定筒内,驱动件包括驱动盘、输出齿轮、输入齿圈、传递齿轮,驱动盘通过轴承同轴活动安装于固定筒内且驱动盘还通过紧固件与罩壳进行固定连接,驱动盘上同轴设置有穿设孔且穿设孔背离转筒出料端的孔口处同轴设置有支撑套筒,驱动盘朝向转筒出料端的端面还设置有齿轮轴一且齿轮轴一沿驱动盘的圆周方向阵列设置有三组;
所述的转轴与转筒同轴布置,转轴的一端位于转筒内且该端为安装端、另一端穿过穿设孔并位于支撑套筒内,转轴的安装端与搅碎构件连接,转轴可绕自身轴向转动并可沿自身轴向发生位移,并且转轴与穿设孔/支撑套筒之间互不干涉,转轴的外圆面还设置有长度与转轴长度一致的外花键二;
所述的输入齿圈同轴固定于固定筒内,输出齿轮上设置有与外花键二相匹配的内花键二且输出齿轮通过内花键二安装于转轴外部,并且当转轴沿自身轴向发生位移时,输出齿轮持续向转轴输出动力,传递齿轮活动安装于齿轮轴一外部且传递齿轮对应设置有三组,输入齿圈与传递齿轮啮合,传递齿轮与输出齿轮啮合;
所述的推送构件包括推送电机、丝杆、接收齿轮、驱动齿轮,推送电机固定于连接支架上且其输出轴轴向平行于转轴轴向;
所述的驱动盘上设置有滑孔,丝杆的轴向平行于转轴的轴向,丝杆的一端位于驱动盘背离转筒出料端的一侧、另一端穿过滑孔并位于转筒内且该端为连接端,丝杆的连接端与搅碎构件固定连接且丝杆沿驱动盘的圆周方向阵列设置有三组,丝杆可沿自身轴向发生位移且被限制绕自身轴向转动;
所述的支撑套筒的外部通过轴承活动安装有传递套筒,推送电机的动力输出端与传递套筒之间设置有动力传递件五,且两者之间通过动力传递件五进行动力传递,动力传递件五为带传动结构且罩壳上开设有用于避让动力传递件五的避让孔;
所述的接收齿轮同轴固定于传递套筒外部,驱动齿轮通过丝母安装于丝杆外部且驱动齿轮对应设置有三组,接收齿轮与驱动齿轮啮合;
所述的搅碎构件位于转筒内,搅碎构件包括安装外壳、输出齿圈、中间齿轮、输入齿轮,安装外壳为一端开口、一端封闭且与转轴同轴布置的圆形壳体结构,安装外壳的开口端安装有端盖且端盖与安装外壳之间构成转动配合,丝杆的连接端与端盖固定连接,端盖朝向安装外壳封闭端的端面设置有轴向平行于转轴轴向的齿轮轴二,且齿轮轴二沿端盖的圆周方向阵列设置有三组;
所述的端盖上同轴设置有伸出孔一,安装外壳封闭端同轴设置有伸出孔二,转轴的安装端穿过伸出孔一/二并位于安装外壳封闭端朝向转筒出料端的一侧;
所述的输入齿轮同轴固定于转轴位于安装外壳内的部分外部,输出齿圈同轴固定于安装外壳内,中间齿轮同轴活动安装于齿轮轴二外部且中间齿轮对应设置有三组,输入齿轮与中间齿轮啮合,中间齿轮与输出齿圈啮合,转轴转动并通过输入齿轮、中间齿轮、输出齿圈牵引安装外壳同步转动,且转轴转向与安装外壳转向相反,输入齿轮/中间齿轮/输出齿圈的一端面与端盖接触、另一端面与安装外壳封闭端接触,端盖沿转轴轴向发生位移并可牵引搅碎构件整体以及转轴同步运动;
所述的转轴的安装端同轴固定有转盘且转盘朝向转筒出料端的端面上阵列设置有若干组搅碎凸起一,安装外壳的封闭端阵列设置有若干组搅碎凸起二。
作为本技术方案的进一步改进。
所述的输送机构包括支撑支架、输送件、输送管道,支撑支架固定安装于固定支架上;
所述的输送件包括从动辊、主动辊、输送网,主/从动辊的轴向均平行于动力轴的轴向且两者均活动安装于支撑支架上并可绕自身轴向转动,输送网设置于主/从动辊之间且输送网上阵列设置有若干组勾拉凸起,输送件的卸料端位于进料端上方且其卸料端位于垃圾储存仓上方;
所述的输送管道固定于固定支架上且其一端与转筒的出料端连接接通、另一端位于输送件进料端的上方,且转筒的出料端高于输送件的进料端并使输送管道呈倾斜布置;
所述的动力传递机构包括带轮轴,带轮轴的轴向平行于动力轴的轴向,带轮轴活动安装于固定支架上并可绕自身轴向转动,带轮轴设置有两组并分别为带轮轴一、带轮轴二;
所述的带轮轴一与动力轴之间设置有动力传递件六且两者之间通过动力传递件六进行动力传递,动力传递件六为带传动结构,动力传递件六的主动带轮上设置有与设置于动力轴外圆面的外花键一相匹配的内花键三,且动力传递件六的主动带轮通过内花键三安装于动力轴外部,并且当动力传递件六的主动带轮沿动力轴的轴向发生位移时,动力轴可通过外花键一与内花键三的配合持续向动力传递件六的主动带轮输出动力,动力传递件六的主动带轮还与安装支架之间以卡接方式连接,安装支架沿导向柱的引导方向滑移并牵引动力传递件六的主动带轮同步滑移;
所述的带轮轴一与带轮轴二之间设置有动力传递件七且两者之间通过动力传递件七进行动力传递,动力传递件七为带传动结构;
所述的带轮轴二与主动辊之间设置有动力传递件八且两者之间通过动力传递件八进行动力传递,动力传递件八为减速齿轮传递结构。
作为本技术方案的进一步改进。
所述的输送机构还包括刮板,刮板的大面垂直于输送件的输送方向且刮板上设置有若干组用于避让设置于输送网上的勾拉凸起的避让区,刮板设置有两组并分别为刮板一、刮板二,刮板一位于输送件的进料端上方且刮板一的避让区设置于其底部,并且刮板一的底部靠近输送网、顶部位于输送管道的正下方,刮板二位于输送件的卸料端下方且刮板二的避让区设置于其顶部,并且刮板二的顶部靠近输送网。
本发明与现有技术相比的有益效果在于,本发明通过打捞件打捞水面垃圾,在垃圾装满打捞件的转筒后,垃圾推送机构会将垃圾推送至垃圾输送装置并经垃圾输送装置输送至垃圾储存仓内,整个水面垃圾收集过程通过操作人员在岸上进行操控,无需操作人员下水,大大降低了操作人员的劳动强度,同时在水面垃圾收集过程中,往复件的运行会使打捞件对本设备覆盖的水面进行打捞,无需操作人员操控本设备左右往复移动打捞,打捞效率更高,除此之外,垃圾在收集储存过程中,搅碎构件会将垃圾中的树枝等进行搅碎,不仅使其在输送过程中更加顺利,还能够减小其在垃圾储存仓内所占体积,使得本设备一次下水能够打捞的垃圾更多。
附图说明
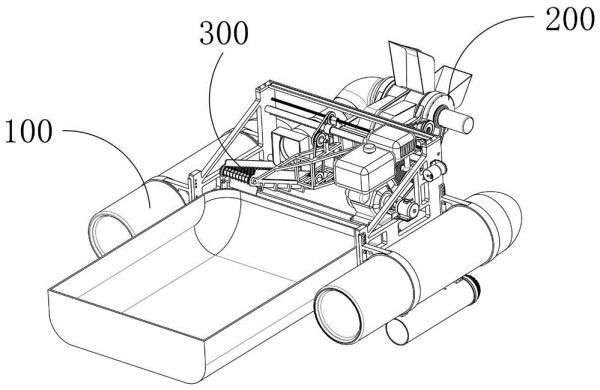
图1为本发明的结构示意图。
图2为本发明的前进装置的结构示意图。
图3为本发明的前进机构的结构示意图。
图4为本发明的前进构件的剖视图。
图5为本发明的主架体与动力机构的配合图。
图6为本发明的动力机构的结构示意图。
图7为本发明的动力机构的结构示意图。
图8为本发明的动力轴、垃圾打捞装置、垃圾输送装置的配合图。
图9为本发明的动力轴、垃圾输送装置的配合图。
图10为本发明的动力轴、垃圾输送装置的配合图。
图11为本发明的输送机构的结构示意图。
图12为本发明的动力轴、垃圾打捞装置的配合图。
图13为本发明的垃圾打捞装置的结构示意图。
图14为本发明的垃圾打捞装置的结构示意图。
图15为本发明的打捞件的结构示意图。
图16为本发明的动力传递构件与打捞件的配合图。
图17为本发明的驱动构件与搅碎构件的配合图。
图18为本发明的驱动构件与搅碎构件的配合图。
图19为本发明的驱动构件的结构示意图。
图20为本发明的搅碎构件与转轴的配合图。
图21为本发明的搅碎构件的结构示意图。
图22为本发明的搅碎构件的内部示意图。
图23为本发明的推送构件的结构示意图。
图24为本发明的推送构件的内部示意图。
具体实施方式
水面垃圾快速打捞的清理方法,其步骤在于:
s1:前进装置100中的动力机构140运行;
所述的前进装置100包括主架体110、前进机构120、垃圾储存仓130、动力机构140,前进机构120包括可漂浮于水面且呈圆柱体结构的浮体121、位于水面下方的前进构件,浮体121与主架体110之间设置有固定套圈122且浮体121通过固定套圈122固定安装于主架体110上,前进机构120设置有两组并分别为安装于主架体110的一侧;
所述的主架体110上设置有引导方向垂直于水面的导向杆,垃圾储存仓130的侧面设置有套接凸起且套接凸起活动套接于导向杆外部并构成滑动导向配合,垃圾储存仓130漂浮于水面且其位于两组前进机构120之间;
所述的动力机构140包括发动机141、中间轴、导向柱144、动力轴145、安装支架146、往复件,发动机141固定于主架体110上,中间轴轴向平行于两组前进机构120之间的距离方向,中间轴活动安装于主架体110上并可绕自身轴向转动,动力轴145/导向柱144的轴向均平行于两组前进机构120之间的距离方向且两者均固定于主架体110上、并且两者均位于两组前进机构120之间,动力轴145的外圆面还设置有长度与动力轴145长度一致的外花键一,发动机141动力输出端与中间轴之间设置有动力传递件一142且两者之间通过动力传递件一142进行动力连接传递,中间轴与动力轴145之间设置有动力传递件二143且两者之间通过动力传递件二143进行动力连接传递,动力传递件一/二均为带传动结构,安装支架146活动安装于导向柱144外部并构成滑动导向配合;
发动机141运行并通过动力传递件一142、中间轴、动力传递件二143牵引动力轴145绕自身轴向转动;
s2:垃圾打捞装置200运行;
所述的垃圾打捞装置200位于安装支架146背离垃圾储存仓130的一侧,垃圾打捞装置200包括连接支架210、打捞件220、垃圾推送机构230,连接支架210固定于安装支架146上且打捞件220与垃圾推送机构230均安装于连接支架210上,打捞件220包括转筒221、舀斗222,转筒221为两端开口且轴向平行于动力轴145轴向的圆筒结构,转筒221活动安装于连接支架210上并可绕自身轴向转动,舀斗222固定于转筒221的外圆面且舀斗222沿转筒221的圆周方向阵列设置有若干组,并且当转筒221绕自身轴向转动时,舀斗222同步转动并可打捞水面垃圾,舀斗222与转筒221之间的固定处还开设有用于供舀斗222内的水面垃圾掉落至转筒221内的通孔,通孔处匹配铰接有可封闭/打开通孔的磁性封板223,舀斗222为铁磁性材料制成并可吸引磁性封板223将通孔封闭;
所述的垃圾推送机构230包括动力传递构件2310、驱动构件2320、推送构件2330、设置于转筒221内的搅碎构件2340,动力传递构件2310用于动力轴145与转筒221之间的动力连接传递,推送构件2330用于推动搅碎构件2320沿转筒221轴向运动并将转筒221内的垃圾推送至垃圾输送装置300内,搅碎构件2340用于对垃圾中的树枝等进行搅碎处理,驱动构件2320用于驱动搅碎构件2340进行搅碎运行;
动力轴145转动并通过动力传递构件2310驱使转筒221绕自身轴向转动,转筒221转动并牵引舀斗222同步转动,舀斗222转动过程中会将水面垃圾舀至自身内部,随后在舀斗222继续转动过程中,垃圾的重力会使磁性封板223打开设置于舀斗222与转筒221之间固定处的通孔,从而使垃圾掉落至转筒221内,掉落完毕后,磁性封板223在磁性作用下重新被舀斗222吸引并封闭通孔,其中部分水会随垃圾一同被舀至转筒221内;
s3:动力传递构件2310在将动力轴145的动力传递至转筒221的同时,动力传递构件2310还将动力轴145的动力传递至驱动构件2320并使其运行,驱动构件2320运行并驱使搅碎构件2340进行搅碎运行并最终对垃圾中的树枝等进行搅碎处理;
当转筒221内储存满垃圾后,打捞件220停止运行,同时推送构件2330运行并推送搅碎构件2320沿转筒221的轴向运动,从而可将转筒221内的垃圾由转筒221出料端推送出去;
s4:所述的垃圾输送装置300位于垃圾储存仓130与转筒221出料端之间,垃圾输送装置300包括固定支架310、输送机构320、动力传递机构330,固定支架310固定安装于安装支架146上且输送机构320、动力传递机构330均安装于固定支架310上,输送机构320用于接收由转筒221出料端输出的垃圾并将其运输至垃圾储存仓130内,动力传递机构330用于接收动力轴145转动产生的动力并将其传递至输送机构320;
所述的转筒221的出料端与输送机构320的进料端之间设置有输送管道,输送管道的一端与转筒221出料端连接接通、另一端位于输送机构320的进料端上方,输送机构320的卸料端位于垃圾储存仓130的上方,转筒221的出料端高于输送机构320的进料端并使输送管道呈倾斜布置;
垃圾与水经转筒221出料端被一同推送至输送管道内并最终经输送管道输送至输送机构320的进料端后,输送机构320运行并将垃圾输送至垃圾储存仓130内且垃圾中的水会被沥出,同时打捞件220继续运行;
s5:所述的往复件包括往复电机147、滑轮148、拉绳149,滑轮148的轴向平行于浮体121轴向且滑轮148活动安装于主架体110上并可绕自身轴向转动,滑轮148设置有两组并分别位于动力轴145沿自身轴向的一侧,往复电机147固定于主架体110上且其输出轴轴向平行于浮体121轴向,往复电机147的动力输出端与一组滑轮148之间同轴固定连接,拉绳149的首端绕过两组滑轮148后与拉绳149的首端固定连接并构成闭合环形回路,安装支架146与拉绳149之间固定连接;
上述垃圾打捞过程中,往复电机147运行并通过拉绳149牵引安装支架146沿导向柱144的引导方向进行往复滑移,安装支架146往复滑移并牵引垃圾打捞装置200/垃圾输送装置300同步往复滑移,通过垃圾打捞装置200/垃圾输送装置300同步往复滑移以及两者配合对垃圾的打捞,从而完成对本设备经过的水面的垃圾打捞处理;
s6:前进构件运行并可牵引本设备前进并对其余水面进行垃圾打捞,其中只需改变两组前进构件的转速并使其形成有转速差即可完成转向。
本发明对水面垃圾进行打捞的优越性在于,本发明通过打捞件打捞水面垃圾,在垃圾装满打捞件的转筒后,垃圾推送机构会将垃圾推送至垃圾输送装置并经垃圾输送装置输送至垃圾储存仓内,整个水面垃圾收集过程通过操作人员在岸上进行操控,无需操作人员下水,大大降低了操作人员的劳动强度,同时在水面垃圾收集过程中,往复件的运行会使打捞件对本设备覆盖的水面进行打捞,无需操作人员操控本设备左右往复移动打捞,打捞效率更高,除此之外,垃圾在收集储存过程中,搅碎构件会将垃圾中的树枝等进行搅碎,不仅使其在输送过程中更加顺利,还能够减小其在垃圾储存仓内所占体积,使得本设备一次下水能够打捞收集的垃圾更多。
用于对塑料袋/瓶、树枝/叶等水面垃圾进行打捞的设备,包括前进装置100、垃圾打捞装置200、垃圾输送装置300,前进装置100可漂浮于水面上且垃圾打捞装置200与垃圾输送装置300均安装于前进装置100上,前进装置100用于在水面前进并牵引垃圾打捞装置200/垃圾输送装置300同步前进,垃圾打捞装置200用于在前进过程中对漂浮于水面的垃圾进行打捞,垃圾输送装置300用于接收垃圾打捞装置200打捞上来的垃圾并将垃圾输送至前进装置100上储存垃圾的区域。
所述的前进装置100包括主架体110、前进机构120、垃圾储存仓130、动力机构140,前进机构120包括可漂浮于水面且呈圆柱体结构的浮体121、位于水面下方的前进构件,浮体121与主架体110之间设置有固定套圈122且浮体121通过固定套圈122固定安装于主架体110上。
所述的前进构件包括固定外壳123、前进电机124、涡轮125,固定外壳123为两端开口且轴向平行于浮体121轴向的圆筒结构,固定外壳123固定于浮体121上且固定外壳123位于浮体121的正下方,前进电机124同轴固定于固定外壳123内,涡轮125同轴固定于前进电机124的动力输出端,优选的,固定外壳123沿涡轮125前进方向的前进端匹配安装有过滤罩126。
所述的前进机构120设置有两组并分别为安装于主架体110的一侧。
前进电机124运行并驱使涡轮125转动,涡轮125转动并牵引本设备前进,其中只需改变两组涡轮125的转速并形成有转速差即可完成转向。
所述的垃圾储存仓130漂浮于水面且其活动安装于主架体110上、并且其位于两组前进机构120之间,具体的,主架体110上设置有引导方向垂直于水面的导向杆,垃圾储存仓130的侧面设置有套接凸起且套接凸起活动套接于导向杆外部并构成滑动导向配合。
所述的动力机构140包括发动机141、中间轴、导向柱144、动力轴145、安装支架146、往复件,发动机141固定于主架体110上,中间轴轴向平行于两组前进机构120之间的距离方向,中间轴活动安装于主架体110上并可绕自身轴向转动,动力轴145/导向柱144的轴向均平行于两组前进机构120之间的距离方向且两者均固定于主架体110上、并且两者均位于两组前进机构120之间,动力轴145的外圆面还设置有长度与动力轴145长度一致的外花键一。
所述的发动机141动力输出端与中间轴之间设置有动力传递件一142且两者之间通过动力传递件一142进行动力连接传递,中间轴与动力轴145之间设置有动力传递件二143且两者之间通过动力传递件二143进行动力连接传递,具体的,动力传递件一/二均为带传动结构。
所述的安装支架146活动安装于导向柱144外部并构成滑动导向配合。
所述的往复件包括往复电机147、滑轮148、拉绳149,滑轮148的轴向平行于浮体121轴向且滑轮148活动安装于主架体110上并可绕自身轴向转动,滑轮148设置有两组并分别位于动力轴145沿自身轴向的一侧,往复电机147固定于主架体110上且其输出轴轴向平行于浮体121轴向,往复电机147的动力输出端与一组滑轮148之间同轴固定连接。
所述的拉绳149的首端绕过两组滑轮148后与拉绳149的首端固定连接并构成闭合环形回路,安装支架146与拉绳149之间固定连接。
所述的主架体110上还固定有发电机,发电机与发动机141同轴布置且发电机与动力传递件一142的主动带轮之间同轴固定连接,发电机用于为本设备中的电机运行提供电力。
发动机141运行并通过动力传递件一142、中间轴、动力传递件二143牵引动力轴145绕自身轴向转动;
往复电机147运行并通过拉绳149牵引安装支架146沿导向柱144的引导方向进行往复滑移。
所述的垃圾打捞装置200位于安装支架146背离垃圾储存仓130的一侧,垃圾打捞装置200包括连接支架210、打捞件220、垃圾推送机构230,连接支架210固定于安装支架146上,打捞件220与垃圾推送机构230均安装于连接支架210上,打捞件220用于打捞水面垃圾,垃圾推送机构230用于驱使打捞件220运行并同时将打捞件220内部的垃圾搅碎推送至垃圾输送装置300内。
所述的打捞件220包括转筒221、舀斗222,转筒221为两端开口且轴向平行于动力轴145轴向的圆筒结构,转筒221活动安装于连接支架210上并可绕自身轴向转动,舀斗222固定于转筒221的外圆面且舀斗222沿转筒221的圆周方向阵列设置有若干组,并且当转筒221绕自身轴向转动时,舀斗222同步转动并可打捞水面垃圾,舀斗222与转筒221之间的固定处还开设有用于供舀斗222内的水面垃圾掉落至转筒221内的通孔,通孔处匹配铰接有可封闭/打开通孔的磁性封板223,舀斗222为铁磁性材料制成并可吸引磁性封板223将通孔封闭。
垃圾推送机构230驱使转筒221绕自身轴向转动,转筒221转动并牵引舀斗222同步转动,舀斗222转动过程中会将水面垃圾舀至自身内部,随后在舀斗222继续转动过程中,垃圾的重力会使磁性封板223打开设置于舀斗222与转筒221之间固定处的通孔,从而使垃圾掉落至转筒221内,掉落完毕后,磁性封板223在磁性作用下重新被舀斗222吸引并封闭通孔。
所述的垃圾推送机构230包括动力传递构件2310、驱动构件2320、推送构件2330、搅碎构件2340,动力传递构件2310用于动力轴145与转筒221之间的动力连接传递,推送构件2330用于推动搅碎构件2320沿转筒221轴向运动并将转筒221内的垃圾推送至垃圾输送装置300内,搅碎构件2340用于对垃圾中的树枝等进行搅碎处理,驱动构件2320用于驱动搅碎构件2340进行搅碎运行。
所述的动力传递构件2310包括罩壳、传递轴、固定筒2313,罩壳固定于连接支架210上且转筒221的一开口端为固定端且该端伸入至罩壳内、另一开口端为出料端,传递轴轴向平行于动力轴145轴向,传递轴活动安装于连接支架210上并可绕自身轴向转动,且传递轴的动力输出端伸入至罩壳内,固定筒2313为两端开口且与转筒221同轴布置的圆环体结构,固定筒2313通过轴承安装于罩壳内且固定筒2313与转筒221固定端之间固定连接。
所述的传递轴的动力输入端与动力轴145之间设置有动力传递件三2311且两者之间通过动力传递件三2311进行动力连接传递,具体的,动力传递件三2311为带传动结构,动力传递件三2311的主动带轮上设置有与设置于动力轴145外圆面的外花键一相匹配的内花键一,且动力传递件三2311的主动带轮通过内花键一安装于动力轴145外部,并且当动力传递件三2311的主动带轮沿动力轴145的轴向发生位移时,动力轴145通过外花键一与内花键一的配合持续向动力传递件三2311的主动带轮输出动力,动力传递件三2311的主动带轮还与安装支架146之间以卡接方式连接,安装支架146沿导向柱144的引导方向滑移并牵引动力传递件三2311的主动带轮同步滑移。
所述的传递轴的动力输出端与固定筒2313的外圆面之间设置有动力传递件四2312且两者之间通过动力传递件四2312进行动力传递,具体的,动力传递件四2312为齿轮齿圈结构。
动力轴145转动并通过动力传递件三2311、传递轴、动力传递件四2312驱使固定筒2313绕自身轴向转动,固定筒2313转动并牵引转筒221同步转动,其中,当连接支架210跟随安装支架146同步往复滑移时,动力轴145可持续通过动力传递件三2311、传递轴、动力传递件四2312向固定筒2313输出动力并使固定筒2313持续转动。
所述的驱动构件2320包括驱动件、转轴2321,驱动件位于固定筒2313内,驱动件包括驱动盘2322、输出齿轮2323、输入齿圈2324、传递齿轮2325,驱动盘2322通过轴承同轴活动安装于固定筒2313内且驱动盘2322还通过紧固件与罩壳进行固定连接,驱动盘2322上同轴设置有穿设孔且穿设孔背离转筒221出料端的孔口处同轴设置有支撑套筒,驱动盘2322朝向转筒221出料端的端面还设置有齿轮轴一且齿轮轴一沿驱动盘2322的圆周方向阵列设置有三组。
所述的转轴2321与转筒221同轴布置,转轴2321的一端位于转筒221内且该端为安装端、另一端穿过穿设孔并位于支撑套筒内,转轴2321的安装端与搅碎构件2340连接,转轴2321可绕自身轴向转动并可沿自身轴向发生位移,并且转轴2321与穿设孔/支撑套筒之间互不干涉,转轴2321的外圆面还设置有长度与转轴2321长度一致的外花键二。
所述的输入齿圈2324同轴固定于固定筒2313内,输出齿轮2323上设置有与外花键二相匹配的内花键二且输出齿轮2323通过内花键二安装于转轴2321外部,并且当转轴2321沿自身轴向发生位移时,输出齿轮2323持续向转轴2321输出动力,传递齿轮2325活动安装于齿轮轴一外部且传递齿轮2325对应设置有三组,输入齿圈2324与传递齿轮2325啮合,传递齿轮2325与输出齿轮2323啮合。
固定筒2313转动并牵引输入齿圈2324同轴转动,输入齿圈2324转动并通过传递齿轮2325牵引输出齿轮2323转动,输出齿轮2323转动并牵引转轴2321同步转动,其中当转轴2321沿自身轴向发生位移时,输出齿轮2323持续向转轴2321输出动力。
所述的推送构件2330包括推送电机2331、丝杆2333、接收齿轮2334、驱动齿轮2335,推送电机2331固定于连接支架210上且其输出轴轴向平行于转轴2321轴向。
所述的驱动盘2322上设置有滑孔,丝杆2333的轴向平行于转轴2321的轴向,丝杆2333的一端位于驱动盘2322背离转筒221出料端的一侧、另一端穿过滑孔并位于转筒221内且该端为连接端,丝杆2333的连接端与搅碎构件2340固定连接且丝杆2333沿驱动盘2322的圆周方向阵列设置有三组,丝杆2333可沿自身轴向发生位移且被限制绕自身轴向转动。
所述的支撑套筒的外部通过轴承活动安装有传递套筒,推送电机2331的动力输出端与传递套筒之间设置有动力传递件五2332,且两者之间通过动力传递件五2332进行动力传递,具体的,动力传递件五2332为带传动结构且罩壳上开设有用于避让动力传递件五2332的避让孔。
所述的接收齿轮2334同轴固定于传递套筒外部,驱动齿轮2335通过丝母安装于丝杆2333外部且驱动齿轮2335对应设置有三组,接收齿轮2334与驱动齿轮2335啮合。
推送电机2331运行并通过动力传递件五2332驱使传递套筒转动,传递套筒转动并通过接收齿轮2334、驱动齿轮2335、丝母使丝杆2333沿自身轴向发生位移,丝杆2333运动并牵引搅碎构件2340同步运动。
所述的搅碎构件2340位于转筒221内,搅碎构件2340包括安装外壳2342、输出齿圈2344、中间齿轮2345、输入齿轮2346,安装外壳2342为一端开口、一端封闭且与转轴2321同轴布置的圆形壳体结构,安装外壳2342的开口端安装有端盖且端盖与安装外壳2342之间构成转动配合,丝杆2333的连接端与端盖固定连接,端盖朝向安装外壳2342封闭端的端面设置有轴向平行于转轴2321轴向的齿轮轴二,且齿轮轴二沿端盖的圆周方向阵列设置有三组。
所述的端盖上同轴设置有伸出孔一,安装外壳2342封闭端同轴设置有伸出孔二,转轴2321的安装端穿过伸出孔一/二并位于安装外壳2342封闭端朝向转筒221出料端的一侧。
所述的输入齿轮2346同轴固定于转轴2321位于安装外壳2342内的部分外部,输出齿圈2344同轴固定于安装外壳2342内,中间齿轮2345同轴活动安装于齿轮轴二外部且中间齿轮2345对应设置有三组,输入齿轮2346与中间齿轮2345啮合,中间齿轮2345与输出齿圈2344啮合,转轴2321转动并通过输入齿轮2346、中间齿轮2345、输出齿圈2344牵引安装外壳2342同步转动,且转轴2321转向与安装外壳2342转向相反,输入齿轮2346/中间齿轮2345/输出齿圈2344的一端面与端盖接触、另一端面与安装外壳2342封闭端接触,端盖沿转轴2321轴向发生位移并可牵引搅碎构件2340整体以及转轴2321同步运动。
所述的转轴2321的安装端同轴固定有转盘且转盘朝向转筒221出料端的端面上阵列设置有若干组搅碎凸起一2341,安装外壳2342的封闭端阵列设置有若干组搅碎凸起二2343。
丝杆2333运动并牵引端盖同步运动,端盖运动并牵引搅碎构件2340整体以及转轴2321同步运动,从而可将转筒221内的垃圾由转筒221出料端推送出去,除此之外,转轴2321转动并最终使搅碎凸起一2341、搅碎凸起二2343均同步转动,并且搅碎凸起一2341、搅碎凸起二2343的转向相反,从而对垃圾中的树枝等进行搅碎处理,使垃圾推送过程能够更加顺利。
所述的垃圾输送装置300位于垃圾储存仓130与转筒221出料端之间,垃圾输送装置300包括固定支架310、输送机构320、动力传递机构330,固定支架310固定安装于安装支架146上且输送机构320、动力传递机构330均安装于固定支架310上,输送机构320用于接收由转筒221出料端输出的垃圾并将其运输至垃圾储存仓130内,动力传递机构330用于接收动力轴145转动产生的动力并将其传递至输送机构320。
所述的输送机构320包括支撑支架321、输送件、输送管道,支撑支架321固定安装于固定支架310上。
所述的输送件包括从动辊322、主动辊323、输送网324,主/从动辊的轴向均平行于动力轴145的轴向且两者均活动安装于支撑支架321上并可绕自身轴向转动,输送网324设置于主/从动辊之间且输送网324上阵列设置有若干组勾拉凸起,输送件的卸料端位于进料端上方且其卸料端位于垃圾储存仓130上方。
所述的输送管道固定于固定支架310上且其一端与转筒221的出料端连接接通、另一端位于输送件进料端的上方,且转筒221的出料端高于输送件的进料端并使输送管道呈倾斜布置。
舀斗222打捞垃圾的同时盛舀上来的水会流进至转筒221内,且该水会跟随转筒221内的垃圾一同被输送至输送管道内,随后在水的流动作用下,垃圾与水会被输送管道输送至输送件的进料端;
动力传递机构330驱使主动辊323转动,从而通过设置于输送网324上的勾拉凸起勾住垃圾并最终将垃圾输送至垃圾储存仓130内,其中垃圾中的水会被沥出。
所述的动力传递机构330包括带轮轴,带轮轴的轴向平行于动力轴145的轴向,带轮轴活动安装于固定支架310上并可绕自身轴向转动,带轮轴设置有两组并分别为带轮轴一、带轮轴二。
所述的带轮轴一与动力轴145之间设置有动力传递件六331且两者之间通过动力传递件六331进行动力传递,具体的,动力传递件六331为带传动结构,动力传递件六331的主动带轮上设置有与设置于动力轴145外圆面的外花键一相匹配的内花键三,且动力传递件六331的主动带轮通过内花键三安装于动力轴145外部,并且当动力传递件六331的主动带轮沿动力轴145的轴向发生位移时,动力轴145可通过外花键一与内花键三的配合持续向动力传递件六331的主动带轮输出动力,动力传递件六331的主动带轮还与安装支架146之间以卡接方式连接,安装支架146沿导向柱144的引导方向滑移并牵引动力传递件六331的主动带轮同步滑移。
所述的带轮轴一与带轮轴二之间设置有动力传递件七332且两者之间通过动力传递件七332进行动力传递,具体的,动力传递件七332为带传动结构。
所述的带轮轴二与主动辊323之间设置有动力传递件八333且两者之间通过动力传递件八333进行动力传递,具体的,动力传递件八333为减速齿轮传递结构。
动力轴145转动并通过动力传递件六331、带轮轴一、动力传递件七332、带轮轴二、动力传递件八333驱使主动辊323绕自身轴向转动,其中,当固定支架310跟随安装支架146同步往复滑移时,动力轴145可持续向动力传递件六331的主动带轮输出动力,即使主动辊323持续转动。
更为具体的,由于输送网324是通过勾拉凸起勾住垃圾后再将垃圾输送至垃圾储存仓130内,该过程中,在垃圾掉落至输送件进料端时,若勾拉凸起未能够及时勾住垃圾,则垃圾会重新掉落至水面,在垃圾被输送件输送至垃圾储存仓130的上方时,若垃圾中含有塑料袋等类似垃圾时,该部分垃圾在被勾拉凸起勾住后未能掉落至垃圾储存仓130内,为了解决这一问题,所述的输送机构320还包括刮板325,刮板325的大面垂直于输送件的输送方向且刮板325上设置有若干组用于避让设置于输送网324上的勾拉凸起的避让区,刮板325设置有两组并分别为刮板一、刮板二,刮板一位于输送件的进料端上方且刮板一的避让区设置于其底部,并且刮板一的底部靠近输送网324、顶部位于输送管道的正下方,刮板二位于输送件的卸料端下方且刮板二的避让区设置于其顶部,并且刮板二的顶部靠近输送网324。
输送管道将垃圾输送至输送件的进料端时,由于刮板一的存在,垃圾会被聚集于刮板一朝向输送件卸料端的一侧并等待被输送网324输送走;垃圾被输送至输送件的卸料端时,由于刮板二的存在,塑料袋等垃圾会被刮板二限制继续跟随输送网324运动,从而被刮板由输送网324上刮落并掉落至垃圾储存仓130内。
实际工作时,前进电机124运行并驱使涡轮125转动,涡轮125转动并牵引本设备前进,其中只需改变两组涡轮125的转速并形成有转速差即可完成转向,同时发动机141运行并通过动力传递件一142、中间轴、动力传递件二143牵引动力轴145绕自身轴向转动;
动力轴145转动并通过动力传递件三2311、传递轴、动力传递件四2312驱使固定筒2313绕自身轴向转动,固定筒2313转动并牵引转筒221同步转动,转筒221转动并牵引舀斗222同步转动,舀斗222转动过程中会将水面垃圾舀至自身内部,随后在舀斗222继续转动过程中,垃圾的重力会使磁性封板223打开设置于舀斗222与转筒221之间固定处的通孔,从而使垃圾掉落至转筒221内,掉落完毕后,磁性封板223在磁性作用下重新被舀斗222吸引并封闭通孔,其中部分水会跟随垃圾一同掉落至转筒221内;
固定筒2313转动的同时还通过输入齿圈2324、传递齿轮2325、输出齿轮2323牵引转轴2321同步转动,并且当转轴2321沿自身轴向发生位移时,输出齿轮2323持续向转轴2321输出动力,转轴2321转动并最终使搅碎凸起一2341、搅碎凸起二2343均同步转动,并且搅碎凸起一2341、搅碎凸起二2343的转向相反,从而对垃圾中的树枝等进行搅碎处理;
当转筒221内储存满垃圾后,打捞件220停止运行,同时推送电机2331运行并通过动力传递件五2332驱使传递套筒转动,传递套筒转动并通过接收齿轮2334、驱动齿轮2335、丝母使丝杆2333沿自身轴向发生位移,丝杆2333运动并牵引端盖同步运动,端盖运动并牵引搅碎构件2340整体以及转轴2321同步运动,从而可将转筒221内的垃圾由转筒221出料端推送出去;
垃圾与水经转筒221出料端被一同推送至输送管道内并最终经输送管道输送至输送件的进料端后,输送件运行并将垃圾输送至垃圾储存仓130内且垃圾中的水会被沥出,同时打捞件220继续运行;
上述垃圾打捞过程中,往复电机147运行并通过拉绳149牵引安装支架146沿导向柱144的引导方向进行往复滑移,安装支架146往复滑移并牵引垃圾打捞装置200/垃圾输送装置300同步往复滑移,通过垃圾打捞装置200/垃圾输送装置300同步往复滑移以及两者配合对垃圾的打捞,从而完成对本水面垃圾打捞设备经过的水面的垃圾打捞处理。
网址:水面垃圾快速打捞的清理方法与流程 https://www.yuejiaxmz.com/news/view/960384
相关内容
一种河道垃圾自动清理方法与流程一种生活垃圾快速卫生分选的方法与流程
水面垃圾清理装置 智能河道清理设备 清理水面垃圾
厨房清洁废水、厨余垃圾综合处理方法与流程
水面垃圾清理机器人设计.docx
垃圾桶的高效清洗方法与流程
水面垃圾清理机器人设计与硬件配置详解
生活垃圾处理控制方法与流程
win10系统如何快速清理垃圾?win10清理系统垃圾方法介绍
节水式汽车快速清洁方法与流程
随便看看
最新动态分享
- 适合搭配的食材
- 食疗养生大全:67种天然食材搭配与食疗方,吃出健康好气色
- 哪些食材可以搭配食用 十对最佳食材搭配好吃又健康
- 壮阳补肾煲汤大全:中药配方与食材搭配全解析
- 广东鱼肚汤的家常做法大全|营养功效+食材搭配+5种经典汤谱(附详细步骤)
- 四季美容养颜豆浆配方大全|天然食材搭配+科学原理,喝出透亮肌
- 零失败家常小炒菜谱大全(附新手必学技巧+食材搭配指南)
- 补肾食谱大全:10种家常食疗方+食材清单,科学搭配提升肾动力
- 5种营养搭配!家常鸡汤快手做法大全(附不同做法+食材禁忌)
- 麻辣香锅食材菜单大全图
热点动态分享
- 144519
- 47009
- 44561
- 40259
- 39428
- 30467
- 25038
- 24826
- 21344
- 18201

