凸优化简介:基本概念与关键定义
将复杂概念简化为关键点 #生活技巧# #学习技巧# #笔记整理技巧#
背景知识
优化问题
凸优化是一类数学优化问题,介绍凸优化前先简单介绍数学优化问题。优化问题定义(形式):minimizef0
subject tofi≤bi,i=1,...,m
其中 x=(x1,…,xn)(向量)是需要优化的变量
f0:Rn→R 是目标函数
fi:Rn→R, i=1,⋯,m是m个约束函数
最终要求解的值x∗是满足所有约束的条件下的所有向量中,使得目标函数取得最小值的向量
优化问题的具体应用场景
投资组合优化优化变量:投资于不同投资方案的金额约束:预算/每个投资方案的最大或最小投资额/最小回报率目标函数:整个投资组合的风险回报率电子电路中的设备大小
优化变量:设备的长和宽约束:制造工艺的限制/时间要求/最大面积目标函数:功耗数据拟合(机器学习中的一些算法,譬如svm等应用)
优化变量:模型的参数约束:参数的限制/优先的条件目标函数:预测的误差函数(loss function等)
除了这些之外优化问题在其他各个领域还有很多的应用,总之优化问题在实际应用场景中是非常常见的。
如何解决优化问题
一般的优化问题:都比较难解决,解决方法一般都是一种折中方案(逼近),由于非常长的计算时间,或者一直没有找到问题的解。一些特例(能够高效和可靠的被解决的一类问题):
最小二乘法问题线性规划问题凸优化问题下面的特例介绍
最小二乘
问题定义(形式)minimize||Ax−b||22最小二乘问题特性:
存在可解析解:x∗=(ATA)−1ATb已有可靠和高效的算法解决此类问题计算时间复杂度:O(n2k), A∈Rk×n已经是一种成熟的工业技术(解决此类问题)最小二乘问题很容易识别
线性规划
问题定义(形式)minimizecTx
subject toaTix≤bi,i=1,…,m特性:
没有解析解已有可靠和高校的算法解决此类问题当m≥n时,计算时间复杂度O(nm)已经是一种成熟的工业技术(解决此类问题)相对最小二乘来说比较难识别出来有一些技巧是把问题转化成线性规划问题求解
凸优化问题
1.问题定义(形式)
minimizef0(x)
subject tofi(x)≤bi,i=1,…,m
目标函数和约束函数都是凸函数,即
fi(αx+βy)≤αfi(x)+βfi(y) ,其中
α+β=1,α≥0,β≥0
2. 特性:
有很多技巧把问题转换成凸优化问题形式求解
最小二乘问题和线性规划问题是优化问题的特例
注:很多非凸问题也可以通过某种形式转化成凸优化问题来求解其近似解(一般在找不到原问题的解或求解原问题所需的时间复杂度太大的情形下使用)。这是解决一类问题的一种技巧,在深度学习的一些模型中经常用到。这是一种逼近的思想。
非线性优化
局部优化方法(非线性规划)全局优化方法凸优化中的一些定义
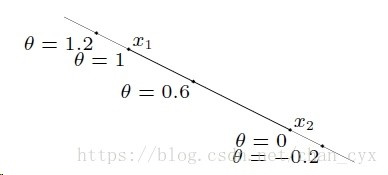
仿射集(Affine set)
定义:仿射集是包含过两个不同的点的直线的所有点。
即x=θx1+(1−θ)x2(θ∈R)
如下图:

推导:设x1,x2是解集中两个不同的点,则有Ax1=b,Ax2=b,且A(θx1+(1−θ)x2)=θAx1+(1−θ)Ax2=θb+(1−θ)b=b,又Ax=b,所以x=θx1+(1−θ)x2,得证。
注:所有的仿射集都可以用线性方程组的解集表示
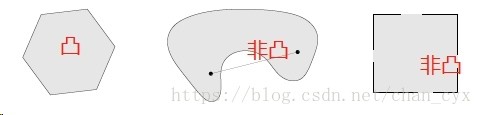
凸集
定义凸集是包含两个不同点之间的直线的所有点。
即x=θx1+(1−θ)x2θ∈(0,1)

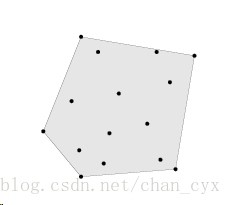
凸组合和凸包
凸组合(convex combination)定义:x1,x2,...,xk的凸组合是满足x=θ1x1+θ2x2+...+θkxk,其中θ1+θ2+...+θk=1,θi≥0的任意点x。
凸包(convex hull)定义:conv S:集合S中的所有点的凸组合所成的集合。
如下图所示,黑点表示原始集合S,阴影部分表示conv S(凸包集合)

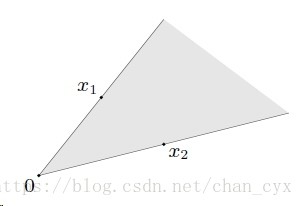
凸锥(Convex cone)
锥组合(conic (nonnegative) combination)定义:x1,x2的锥组合是满足x=θ1x1+θ2x2,其中θ2≥0,θ1≥0的任意点x。
如下图,阴影部分为锥组合所成的集合
定义:convex cone:集合S中的所有点的锥组合所成的集合。
超平面和半空间
超平面(hyperplane)定义:满足{x|aTx=b} (a≠0)的集合。
如下图,其中b可以看作是截距或者是位移项,a是法向量。
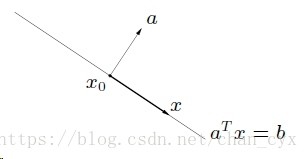
注:更多关于超平面的介绍请看之后关于SVM介绍一文中的预备知识
定义:满足{x|aTx≤b (a≠0)}的集合。
如下图所示,阴影部分为半空间:
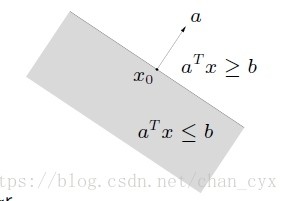

注:超平面是仿射集,同时是凸集,半空间是凸集但不是仿射集
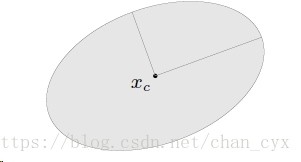
球和椭圆
球(Euclidean ball)定义:B(xc,r)={x| ||x−xc||2≤r}={xc+ru| ||u||2≤1},其中xc是圆心,r是半径。
椭圆定义:{x| (x−xc)TP−1(x−xc)≤1}={xc+Au| ||u||2≤1},其中
P∈Sn++,即P是对称正定矩阵,A是方阵,非奇异矩阵。
范数球和范数锥
范数定义:满足以下条件的函数||.||
||x||≥0; 当且仅当x=0时,||x||=0对t∈R, ||tx||=|t| ||x||||x+y||≤||x||+||y||(三角不等式)符号:||.||是一般范数,||.||symb是特殊范数。
注:
范数(包括Lp)是将向量映射到非负值的函数,直观上,向量x的范数衡量从原点到点x的距离。Lp范数定义:||x||p=(∑i|xi|p)1pL2范数称为欧几里得范数,表示原点到向量x的欧几里得距离L∞范数为最大范数,即||x||∞=maxi|xi|Frobenius范数,即||A||F=√∑i,jA2i.j=√tr(ATA),用于衡量矩阵大小。两个向量的点积可以用范数来表示:xTy=||x|| ||y||cosθ平方L2范数也常用来衡量向量的大小,可通过xTx来计算 范数球定义:{x| ||x−xc||≤r},其中xc是圆心,r是半径。
范数锥定义:{(x,t)| ||x||≤t}
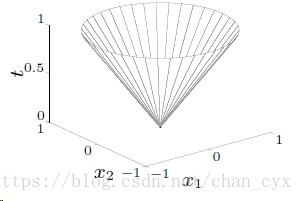

注:欧几里得范数锥又叫第二顺序锥(L2锥),范数球和范数锥都是凸集
多面体(Polyhedra)
定义:Ax≤b,Cx=d,
其中A∈Rm×n, C∈Rp×n,不等式≤是分量式不等式,即每个维度上这个不等式都成立。
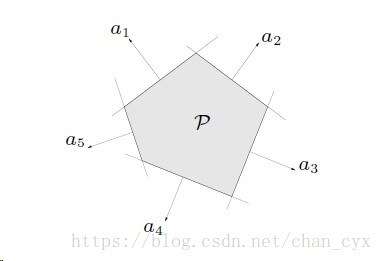
注:多面体是有限个超平面和半空间的交集,如上图所示
半正定锥
符号定义: Sn是n×n的对称矩阵集Sn+={X∈Sn|X≥0}是n×n半正定矩阵集,其中X∈Sn+⟺(对所有的z)zTXz≥0, $S_+^n是凸锥(convex cone)Sn++={X∈Sn|X=0}是n×n正定矩阵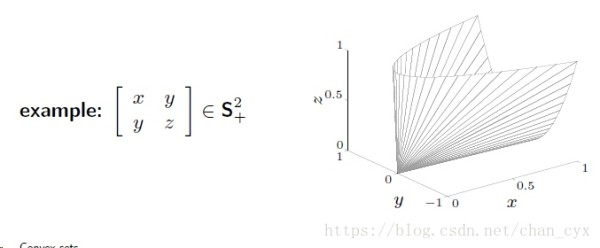

参考
《Convex Optimization》 – Stephen Boyd and Lieven Vandenberghe网址:凸优化简介:基本概念与关键定义 https://www.yuejiaxmz.com/news/view/1059812
相关内容
最优化方法学习笔记01——基本概念基于学习的运筹优化算法进展与发展趋势(一):优化观点、常见优化方法和概念澄清
休闲的基本概念及其界定
装修基本概念
凸优化总结
线性规划入门:概念与基本应用
一体化生活污水处理设备的基本概念及其优点
浅析家政服务业的基本概念
最优化:建模、算法与理论/最优化计算方法
家具的概念与意义
随便看看
最新动态分享
- 适合搭配的食材
- 食疗养生大全:67种天然食材搭配与食疗方,吃出健康好气色
- 哪些食材可以搭配食用 十对最佳食材搭配好吃又健康
- 壮阳补肾煲汤大全:中药配方与食材搭配全解析
- 广东鱼肚汤的家常做法大全|营养功效+食材搭配+5种经典汤谱(附详细步骤)
- 四季美容养颜豆浆配方大全|天然食材搭配+科学原理,喝出透亮肌
- 零失败家常小炒菜谱大全(附新手必学技巧+食材搭配指南)
- 补肾食谱大全:10种家常食疗方+食材清单,科学搭配提升肾动力
- 5种营养搭配!家常鸡汤快手做法大全(附不同做法+食材禁忌)
- 麻辣香锅食材菜单大全图
热点动态分享
- 144602
- 47845
- 44627
- 40418
- 40348
- 30628
- 25140
- 25023
- 21612
- 18310

