【电子设计竞赛E题解法】:自适应滤波器的优化与实战技巧(专家级指南)
电子竞技新手指南:游戏教程与实战技巧的完美结合 #生活乐趣# #游戏乐趣# #游戏教程#
目录
摘要 关键字 1. 自适应滤波器基本原理与应用场景 2. 自适应滤波器理论基础 2.1 数字信号处理基础 2.1.1 离散时间信号与系统 2.1.2 线性时不变系统与Z变换 2.2 自适应滤波器的工作原理 2.2.1 滤波器结构概述 2.2.2 自适应算法原理 2.2.3 常见自适应算法对比分析 2.3 自适应滤波器性能指标 2.3.1 稳态误差与收敛速度 2.3.2 算法复杂度与资源消耗 3. 自适应滤波器优化策略 3.1 算法优化 3.1.1 步长因子调整技术 3.1.2 正则化技术与噪声抑制 3.2 结构优化 3.2.1 滤波器结构简化方法解锁专栏,查看完整目录
摘要
本文系统地介绍了自适应滤波器的基本原理、理论基础、优化策略、实战技巧以及进阶应用。首先,概述了自适应滤波器在不同领域的应用场景。接着,详细探讨了数字信号处理的基础知识、自适应滤波器的工作原理及其性能指标。文中进一步阐述了提高自适应滤波器性能的优化策略,包括算法和结构的优化以及硬件实现的考量。实战技巧部分着重于仿真工具选择、案例分析和调试问题解决方法。最后,探讨了自适应滤波器的创新应用、研究趋势与挑战,并对未来发展方向进行了展望,强调了其在电子设计和工业应用中潜在的重要影响。
关键字
自适应滤波器;数字信号处理;性能指标;优化策略;硬件实现;仿真工具;噪声消除;无线通信;机器学习;创新应用
参考资源链接:2017年全国大学生电子设计竞赛自适应滤波器(E题)报告.pdf
1. 自适应滤波器基本原理与应用场景
在数字信号处理的海洋中,自适应滤波器以其独特的自适应性成为众多技术中的明星。它的基本原理是根据环境的实时变化调整其参数,以达到最佳的滤波效果。在第一章中,我们将探讨自适应滤波器的原理,并分析其在不同场景中的实际应用。比如,我们会在通话中感受到自适应滤波器消除噪声的功能;在无线通信中,它用于信号增强和干扰抑制;在医疗设备中,它可用来提高数据的准确性。自适应滤波器的灵活性和高效性,使其成为现代电子系统中的关键组成部分。
2. 自适应滤波器理论基础
2.1 数字信号处理基础
数字信号处理是自适应滤波器工作的基石,它涉及到信号与系统的离散时间表示,以及如何通过数学工具来分析和处理这些信号。在深入自适应滤波器的结构和算法之前,我们首先需要理解这些基本概念。
2.1.1 离散时间信号与系统
在数字信号处理领域,连续时间信号经过采样和量化被转换为离散时间信号。这些信号可以用序列{x[n]}表示,其中n是整数索引。离散时间系统则对这些信号进行操作,输出另外一系列离散信号{y[n]}。系统的特性可以通过其对输入信号的响应来描述。
一个线性时不变(LTI)系统是数字信号处理中最重要的一种系统模型。它的特性不随时间改变,且满足叠加原理。这意味着系统对两个信号的叠加响应等于两个信号单独响应的叠加。
2.1.2 线性时不变系统与Z变换
线性时不变系统的分析工具是Z变换,这是一种用于离散时间信号的傅里叶变换。它将离散时间序列转换为复频域表示,使得在频域中分析系统成为可能。Z变换对于理解信号如何通过LTI系统以及如何设计滤波器至关重要。
Z变换的数学定义是:
[ X(z) = \sum_{n=-\infty}^{\infty} x[n]z^{-n} ]
其中,X(z)是序列x[n]的Z变换,z是复数变量。
通过Z变换,可以更容易地分析系统的频率响应,设计滤波器,以及解决差分方程等。
2.2 自适应滤波器的工作原理
自适应滤波器通过一个动态调整的算法自动调整其滤波器参数,以适应信号环境的变化。其核心在于能够根据输入信号和参考信号之间的误差来实时更新其系数。
2.2.1 滤波器结构概述
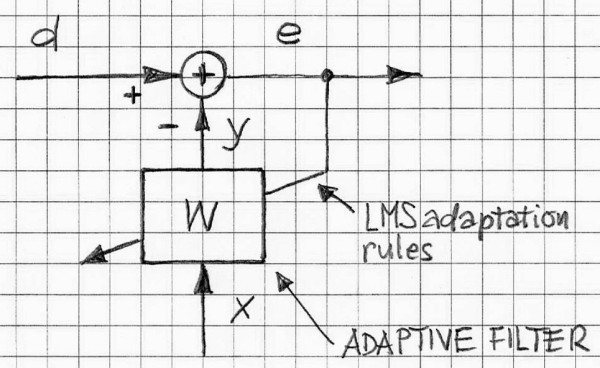
自适应滤波器通常由几个基本组件构成:一个可调系数的数字滤波器,一个参考信号输入,一个误差信号计算单元,以及一个自适应算法来调整滤波器系数。
滤波器结构可以是FIR(有限脉冲响应)或IIR(无限脉冲响应)类型。FIR滤波器在实现时更稳定,因为它们总是无条件稳定的,而IIR滤波器则可能因反馈环路的存在而变得不稳定。
2.2.2 自适应算法原理
自适应算法是自适应滤波器的核心,负责根据误差信号动态调整滤波器系数。算法的关键是能够以一种有效的方式来最小化误差。常见的算法包括最小均方(LMS)算法和递归最小二乘(RLS)算法。
这些算法通过迭代方式逐步调整滤波器系数,使得误差信号的平均功率达到最小。每一次迭代,算法都会计算一个新的误差信号,并根据这个误差调整系数,使得下次迭代的误差更小。
2.2.3 常见自适应算法对比分析
各种自适应算法在性能、稳定性和计算复杂度方面都有所不同。LMS算法简单且易于实现,但收敛速度相对较慢;RLS算法收敛速度快,但计算成本较高,对参数选择非常敏感。
下面是一个LMS算法的伪代码例子,以展示其核心原理:
# 假设x为输入信号,d为期望信号,w为滤波器系数,mu为步长参数w = [0, 0, ..., 0] # 初始化滤波器系数N = len(w) # 滤波器长度for n in range(1, M): # M为信号长度 y = np.dot(w, x[n-1::-1]) # 计算滤波器输出 e = d[n] - y # 计算误差 w = w + 2 * mu * e * x[n-1:N-1:-1] # 更新滤波器系数
在上述代码中,x[n-1::-1]表示将输入信号向后移动一个单位并取反,以匹配FIR滤波器的因果性。系数w被更新以减少误差e。
2.3 自适应滤波器性能指标
自适应滤波器的性能可以通过多个指标来衡量,其中包括稳态误差与收敛速度,算法复杂度与资源消耗等。
2.3.1 稳态误差与收敛速度
稳态误差是滤波器在学习过程结束后,误差信号的平均值。稳态误差越小,表明滤波器的性能越好。收敛速度是自适应算法达到稳态所需的迭代次数。一个快速收敛的算法可以在较短时间内提供满意的滤波效果。
2.3.2 算法复杂度与资源消耗
算法复杂度直接影响到自适应滤波器的计算资源消耗。这包括所需的乘法和加法次数、内存使用量以及算法的稳定性等因素。在资源受限的环境中,如嵌入式系统或移动设备,选择具有低复杂度的算法至关重要。
下一章我们将探讨自适应滤波器的优化策略,从算法优化、结构优化到硬件实现考量,深入探究如何提升自适应滤波器的性能。
3. 自适应滤波器优化策略
自适应滤波器作为数字信号处理领域的重要组成部分,其性能的优劣往往直接决定了系统的整体性能。为了提高自适应滤波器的工作效率和准确性,必须对其进行优化。本章节将从算法优化、结构优化以及硬件实现三个角度探讨自适应滤波器的优化策略。
3.1 算法优化
3.1.1 步长因子调整技术
在自适应滤波器的应用中,步长因子的选择对算法的性能至关重要。步长因子决定了滤波器权重调整的幅度,影响着滤波器的收敛速度和稳态误差。过大的步长可能导致系统的不稳定和高稳态误差,而过小的步长则会造成收敛速度过慢,响应时间加长。
过大
过小
开始
步长因子调整
系统不稳定
收敛速度慢
调整成功
重新调整步长因子
继续算法执行
在实际应用中,常见的步长因子调整技术包括时变步长因子、基于误差信号动态调整步长因子等。例如,在LMS(最小均方)算法中,可以通过以下公式动态调整步长因子μ:
μ = μ_min + (μ_max - μ_min) * (1 - exp(-γ * n))
其中,μ_min和μ_max分别代表最小和最大步长因子,γ是控制调整速率的常数,n是当前的迭代次数。通过这种调整,步长因子会随着迭代次数的增加而逐渐接近最佳值。
3.1.2 正则化技术与噪声抑制
正则化技术是用于改善算法稳定性和减小过拟合问题的一种有效手段。在自适应滤波器中应用正则化技术,可以帮助抑制噪声,防止算法对噪声过度敏感。
假设有一个简单的自适应滤波器权重更新方程:
w(n+1) = w(n) + μ * e(n) * x(n)
其中,w(n)为当前权重向量,μ为步长因子,e(n)为误差信号,x(n)为输入信号。若加入正则化项,则更新方程可修改为:
w(n+1) = w(n) + μ * e(n) * x(n) + λ * w(n)
这里,λ为正则化因子,通常取值较小。正则化项 λ * w(n) 可以看作是对权重向量的一个抑制噪声的作用,保证权重向量不会因过大的步长而发生大幅波动。
3.2 结构优化
3.2.1 滤波器结构简化方法
滤波器结构的简化有利于减少
网址:【电子设计竞赛E题解法】:自适应滤波器的优化与实战技巧(专家级指南) https://www.yuejiaxmz.com/news/view/1059834
相关内容
四阶RC有源高通滤波器的优化设计如何运用电源滤波器优化电子设备
【言必信】如何运用电源滤波器优化电子设备
【树莓派噪声消除技术】:音频信号数字滤波的专家指南
哈工程在第十六届全国大学生节能减排社会实践与科技竞赛中再创佳绩
上海星思半导体新专利:创新滤波技术引领电子设备未来
家庭电器的使用与安全维护技巧实用指南文档指南.pptx
旧款Android设备升级指南:优化性能与兼容性的编程技巧
帮推 | 校级竞赛+大佬手把手培训“互联网+”、“挑战杯”+小白训练营=?
“取竞通优”——第2届全国大学生化学实验创新设计大赛的赛后总结与思考
随便看看
最新动态分享
- 家庭消毒不用愁!5大物理消毒法守护健康生活
- カビをアルコール退治|消毒用エタノールでの除菌方法やNG使用法も
- 消毒产品目录
- 基于STM32的智能鞋柜控制系统设计与实现
- 【解決】家具に生えたカビの取り方、予防法、原因を紹介
- 抗菌实验不同操作方法及细节对试验结果的影响
- 多部门推动物联网创新发展 到2028年这些技术要突破
- 生活区节水节电节能管控措施.docx
- 家庭节约用电有哪些具体方法?
- 北京市出台碳普惠管理办法 市民低碳行为将能“变现”
热点动态分享
- 145121
- 52564
- 45145
- 42509
- 40953
- 30925
- 25736
- 25540
- 21934
- 18665

