软考达人—专业的软考刷题题库,软考历年真题,软考模拟考试,软考考前押题。柴丁科技
多做历年真题熟悉考试题型 #生活技巧# #学习技巧# #考试备考技巧#
服务型智能扫地机器人因其低廉的价格和高效的工作能力,越来越受到消费者的认可,目前已 逐渐进入家庭生活代替人们的清洁工作,具有广阔的市场。
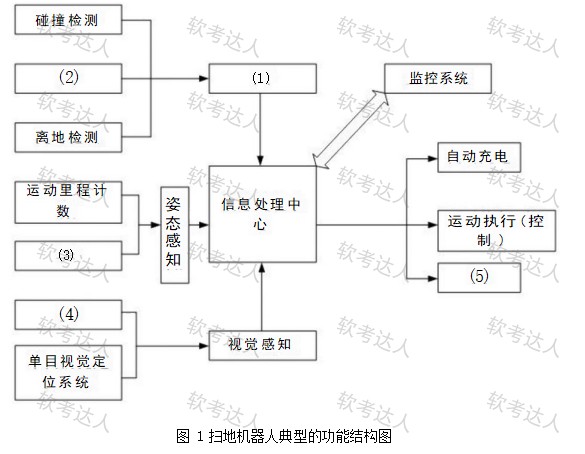
服务型智能扫地机器人需要具有自主运动规划和导航功能,在其工作过程中,需要通过对环境 信息的融合感知进行行为决策。扫地机器人一般具备的主要功能包括:
(1)紧急状态感知:包括碰撞检测、跌落检测和离地检测等功能,防止与障碍物碰撞、前方 台阶跌落危险以及扫地机器人离地等,实现扫地机器人运动中的自我保护。
(2)姿态感知:包括运动里程计数和航向测量等功能,需要获取扫地机器人的运动速度、行 走距离、航向角度等信息。
(3)视觉感知:包括单目视觉避障系统和单目视觉定位系统等,需要通过视觉信息探测障碍 物,视觉信息来自两个单目摄像头系统。在某些设计中,也可结合红外测距传感器进行障碍物 探测。
(4)自动充电:在工作过程中,需要实时监控扫地机器人的电量,且在电量少于一定阈值时 自动返回电源处进行充电。
(5)扫地及吸尘单元:使用电机控制刷子实现清扫,使用抽灰电机实现吸尘。 (6)运动执行:对机器人的运动进行控制。
(7)监控系统:通过无线网络传递扫地机器人的状态数据及视频图像等信息到远程客户端, 客户端参与到扫地机器人的运动监视及控制中,实现信息交互,监控扫地机器人的实时状态。 客户端包括PC 客户端和手机客户端两种。
(8)信息处理中心:用于接收各种传感器信息和视觉信息,通过分析处理进行扫地机器人的
运动控制,且负责和后台监控中心通信。
服务型智能扫地机器人选用ARM+STM32 双核架构模式,分别处理数据量较大的图像信息和 短促型的非图像信息。STM32 选用 STM32F103VET6 芯片,用于实现非图像以外的众多传感 器的驱动以及数据采集,并控制车轮电机的运动;ARM 选 用S5PV210 处理器实现摄像头图片 的采集、在监控系统中接入无线网络、对STM32 串口传过来的传感器数据以及图像定位和避 障信息做综合处理,生成运动决策,发送给 STM32, 执行扫地机的前进、后退、转弯等。
问题内容:
【问题1】 (10分)
图1是本题的服务型智能扫地机器人典型的功能结构图,请根据说明的描述,填写(1)~(5) 空白处,完成该功能结构图。
【问题2】 (9分)
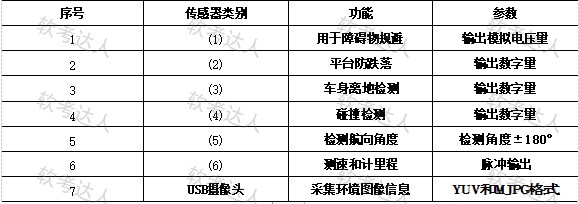
为了实现服务型智能扫地机器人的功能,就需要多种传感器来感知工作环境信息。王工在对传 感器进行选型时,选择了如下类型的传感器:
1.USB 摄像头;
2.开关式传感器;
3.槽型光耦模块;
4.数字式防跌落传感器;
5.红外测距传感器;
6.GGPM01A 单轴角度陀螺仪(传感器);
7.霍尔码盘传感器。
请根据传感器的功能完成表1。
【问题3】 ( 6 分 )
由于该服务型智能扫地机器人的硬件采用双处理器架构,即 ARM+STM32 双核架构模式。多 核处理器一般有SMP 和 AMP 两种不同的工作方式。请用200字以内的文字简述 SMP 和 AMP 的差异。
网址:软考达人—专业的软考刷题题库,软考历年真题,软考模拟考试,软考考前押题。柴丁科技 https://www.yuejiaxmz.com/news/view/1068884
相关内容
十大好用的考试题库软件 手机题库app哪个好 刷题软件推荐考驾照练题软件排行榜前十名
驾照考试模拟软件怎么用驾驶证考试模拟软件教程
自考笔果题库电脑版
软考网络工程师
高考语文语病主观题专题训练(高考真题与模拟试题)
2020电工(中级)考试题库及电工(中级)模拟考试系统
软件测试师职业规划参考
90后收集30几万份考研真题 创办“考研真题网”
新交规科目一考试题库及答案
随便看看
最新动态分享
- 适合搭配的食材
- 食疗养生大全:67种天然食材搭配与食疗方,吃出健康好气色
- 哪些食材可以搭配食用 十对最佳食材搭配好吃又健康
- 壮阳补肾煲汤大全:中药配方与食材搭配全解析
- 广东鱼肚汤的家常做法大全|营养功效+食材搭配+5种经典汤谱(附详细步骤)
- 四季美容养颜豆浆配方大全|天然食材搭配+科学原理,喝出透亮肌
- 零失败家常小炒菜谱大全(附新手必学技巧+食材搭配指南)
- 补肾食谱大全:10种家常食疗方+食材清单,科学搭配提升肾动力
- 5种营养搭配!家常鸡汤快手做法大全(附不同做法+食材禁忌)
- 麻辣香锅食材菜单大全图
热点动态分享
- 144597
- 47775
- 44624
- 40401
- 40299
- 30623
- 25135
- 25010
- 21606
- 18303

