一种摆动式擦窗机器人玻璃边缘检测方法与流程
窗户玻璃更换:拆除旧玻璃,测量新玻璃,安装新玻璃,密封边缘,清洁处理。 #生活知识# #家庭生活# #家居装修技巧# #施工流程#
本发明涉及智能家居控制领域,具体涉及摆动式擦窗机器人玻璃边缘检测方法。
背景技术:
由于智慧生活的快速普及,各种类型的擦窗机器人越来越多地出现在人们的日常生活中,其中摆动式擦窗机器人因其采用负压吸附原理,外形结构简单,同时将擦窗转盘当做行走机构完成摆动式行走动作,将吸附、行走以及擦拭动作合一,在消除擦痕的同时能最大限度地改善擦拭效果而在市面上较为常见。擦窗机器人要实现较高的擦除率,必须保证能准确判定出所擦窗户边框的位置,但是目前市场上摆动式擦窗机器人仍存在着对玻璃边缘位置存在误判、玻璃擦除率不稳定等情况。例如,当玻璃表面存在较大脏物时,擦窗机器人容易将此脏物位置判断为玻璃边缘,直接执行后续方向切换流程,从而导致擦除不干净和擦窗死区的出现。因此如何准确判断出玻璃边缘并提高擦除率成为一个有待研究的重点。
目前,针对擦窗机器人的研究主要集中在外形结构设计、驱动方式设计、控制方法等方面,针对具体的玻璃边缘检测方法研究较少。姚重彬给出了市面上较为流行的两款智能擦窗机器人的详细比较(姚重彬.智能擦玻璃机器人的研究和应用分析[J].科技风,2015(15):119-120.),大体介绍了摆动式擦窗机器人的外形结构设计以及擦除方法,但却没有针对控制方法中的玻璃边缘检测进行描述分析;长春工程学院的杜微、孙雅萍、孟艳萍通过对擦窗机器人在跨越运动时的力学分析,得出了一般情况下机器人在跨越时保证不发生倾翻和下滑的状态下进行跨越的条件公式(杜微,孙雅萍,孟艳萍.擦窗机器人越障问题的研究[J].科技创新与应用,2015(34):79-79.),但其针对的是两个车体的履带式擦窗机器人,机械结构复杂,未给出本发明所提出问题的解决方案;王舒欢、李红利将语音控制方法加入到擦窗机器人的控制中,采用了DTW(Dynamic Time Warping,动态时间规整)语音识别技术,将控制任务进行了一定程度上的细分(王舒欢.一种语音控制擦窗机器人方法:中国,104865973[P].2015-08-26),但其研究基于擦窗机器人已经能完成基本运动功能之上进行的遥控控制方法的研究,并未涉及擦窗机器人控制器内部程序针对玻璃边缘检测方面的判断处理方法。
技术实现要素:
本发明要克服现有技术的上述缺点,提供一种摆动式擦窗机器人玻璃边缘检测方法。
本发明针对摆动式擦窗机器人具体控制流程中玻璃边缘检测相关部分,给出使用容错判断模式准确判断玻璃边缘的方法,旨在解决摆动式擦窗机器人现有技术中存在的玻璃边缘触碰检测不准确问题,使得摆动式擦窗机器人在工作中尽可能地减少擦窗死区,提高擦除率。
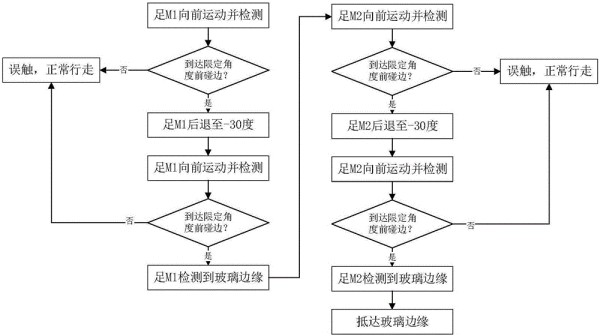
本发明为解决上述技术问题而采用的技术方案是:在玻璃边缘检测过程中加入容错判断模式,其具体执行流程如图1所示;在摆动式擦窗机器人擦除作业过程中允许擦窗机器人擦窗底盘对玻璃边缘位置进行一次误判,当擦窗机器人将某处暂时判定为玻璃边缘时,擦窗机器人通过退回一步再擦除的方式验证第一次判断结果。若两次擦除过程中均发现此处存在玻璃边缘,则认为第一足M1已经以较大可能性抵达玻璃边缘,此后,通过控制擦窗机器人的另一个擦窗底盘(第一足M2)向行进方向进行相同于第一足M1的运动,判定第一足M2是否抵达玻璃边缘,当且仅当第一足M1和第一足M2同时判定为抵达玻璃边缘,才判定此处为玻璃边缘位置并置相应标志位。具体步骤如下:
步骤1:控制第一足M1向行进方向运行,并实时检测其功率反馈情况,如果在擦窗机器人机身倾斜角度限定范围(机身角度限定范围)内检测到触碰玻璃边缘,则控制第一足M1后退一定角度,此后第一足M1继续向前运动并检测功率反馈大小,如果在机身角度限定范围内并未检测到触碰玻璃边缘,则说明第一次判定为误判,擦窗机器人不执行后续流程,直接进入正常行走模式;相反,如果第二次第一足M1同样检测到触碰玻璃边缘,则说明第一足M1以较大可能性抵达玻璃边缘,置第一足M1触碰玻璃边缘标志位为1,后续执行步骤2。
步骤2:控制第一足M2向行进方向运动,并实时检测其功率反馈情况,如果在机身角度限定范围内检测到触碰玻璃边缘,则控制第一足M2后退一定角度,此后第一足M2继续向前运动并检测功率反馈大小,如果在机身角度限定范围内并未检测到触碰玻璃边缘,则说明第一足M2第一次判定为误判,步骤1中第一足M1玻璃边缘的检测也为误判,擦窗机器人不执行后续流程,直接进入正常行走模式;相反,如果第二次第一足M2同样检测到触碰玻璃边缘,则说明第一足M2抵达玻璃边缘,置第一足M2触碰玻璃边缘标志位为1。
步骤3:置擦窗机器人准确抵达玻璃边缘标志位为1,同时,为了减少其它标志位对后续程序执行逻辑的影响,清除第一足M1、第一足M2触碰玻璃边缘标志位,此时擦窗机器人准确找到玻璃边缘位置。
以上步骤均通过编写为计算机软件运行,它包括两大部分,第一部分是擦窗机器人某个足对玻璃边缘的判定,包括前后两次检测确认;第二部分另一个足两次检测确认,对前一个足触碰玻璃边缘判定进行验证。通过二者的配合,可以实现摆动式擦窗机器人对玻璃边缘有效地触碰检测。
本发明提供的摆动式擦窗机器人玻璃边缘检测方法对比现有技术有如下的有益效果:
1、引入容错判断模式,多次验证触碰玻璃边缘准确性,有效避免擦窗机器人对玻璃边缘的误判,减少擦窗死区。
2、多次判断检验过程可以增大对玻璃污渍较多区域的清洁力度,使擦窗机器人工作效率更好、使用效果更明显。
附图说明
图1是本发明的摆动式擦窗机器人容错判断模式执行流程图
图2是本发明的摆动式擦窗机器人玻璃边缘检测方法实验所用Win-Robot摆动式擦窗机器人;
图3是容错模式针对玻璃表面脏物执行示意图;
图4是容错模式针对玻璃边缘执行示意图;
具体实施方式
以下结合附图对本发明一种摆动式擦窗机器人玻璃边缘检测方法通过简单实例作进一步描述。
本发明一种摆动式擦窗机器人玻璃边缘检测方法主要有以下内容:在玻璃边缘检测过程中加入容错判断模式,其具体执行流程如图1所示;在摆动式擦窗机器人擦除作业过程中允许擦窗机器人擦窗底盘对玻璃边缘位置进行一次误判,当擦窗机器人某个擦窗底盘对应电机(第一足M1)第一次被检测到超过设定阈值的电机功率反馈正向跳变(触碰玻璃边缘)时,擦窗机器人将此处暂时判定为玻璃边缘,此处也有可能为较大的脏物,此后,擦窗机器人退回一步并再次对此处进行擦除作业,同时记录第二次擦除过程中第一足M1功率反馈正向跳变情况,即进行第二次擦除以验证第一次判断结果。若两次擦除过程中均发现此处存在玻璃边缘,则认为第一足M1已经以较大可能性抵达玻璃边缘,此后,通过控制擦窗机器人的另一个擦窗底盘(第一足M2)向行进方向进行相同于第一足M1的运动,判定第一足M2是否抵达玻璃边缘,当且仅当第一足M1和第一足M2同时判定为抵达玻璃边缘,才判定此处为玻璃边缘位置并置相应标志位。在实施案例中,使用图2所示Win-Robot摆动式擦窗机器人,其部分基本参数如下:
净重:0.94kg
尺寸:300×150×120mm(长*宽*高)
擦窗底盘轴心距:150mm
转盘半径:145mm
擦除速度:4分钟/平方公尺
以第一足M1先触碰玻璃边缘为例,实例实施具体过程如下:
步骤1:两次验证第一足M1是否触碰玻璃边缘
在玻璃边缘前方使用泥浆涂出一片较大的区域模拟玻璃表面脏物,使用Win-Robot摆动式擦窗机器人进行擦除时,当其第一足M1进入该区域进行擦除时,第一足M1由于受到突变的阻力而产生较大的功率反馈突变,即检测到触碰玻璃边缘,于是第一足M1会向后退回一定角度后,再继续向前擦除,由于第一次已经擦过的路径不再有泥浆,因此第二次向前运动时,Win-Robot并没有检测到触碰玻璃边缘,擦窗机器人正常向前行走,容错模式针对玻璃表面脏物运行示意图如图3所示。
步骤2:第一足M2两次往复运动验证第一足M1触碰玻璃边缘判断准确性。
设定程序,Win-Robot抵达玻璃边缘后停止运动并发出报警,在具体实施过程中将Win-Robot放置于玻璃边缘附近,保持玻璃表面无明显污渍,使Win-Robot靠近玻璃边缘运动,Win-Robot的容错判断模式针对玻璃边缘运行示意图如图4所示。在第一足M1确认触碰玻璃边缘后,Win-Robot控制第一足M2执行图4中④-⑦的过程,到达过程⑦后,Win-Robot停止运动,并提示已经抵达玻璃边缘,符合实验预期。
步骤3:清除与设置相应标志位。
在Win-Robot的软件工程中,设置擦窗机器人抵达玻璃边缘标志位为1,清除第一足M1和第一足M2触碰玻璃边缘标志位,通过设置对应的全局变量即可实现该步骤。
本说明书实施例所述的内容仅仅是对发明构思的实现形式的列举,本发明的保护范围不应当被视为仅限于实施例所陈述的具体形式,本发明的保护范围也及于本领域技术人员根据本发明构思所能够想到的等同技术手段。
网址:一种摆动式擦窗机器人玻璃边缘检测方法与流程 https://www.yuejiaxmz.com/news/view/1087343
相关内容
一种摆动式擦窗机器人玻璃边缘检测方法.pdf一键智能擦窗,玻妞188擦窗机器人
一种自动清洗和关闭的窗户及清洗方法与流程
擦窗机器人有必要买吗?最建议买的三款擦窗机:高层玻璃擦窗神器
有人用过智能擦玻璃机器人吗?擦窗机好不好用?人工擦的干净还是擦玻璃机器人方便?
双面擦玻璃窗神器哪种好用
玻璃清洁器及配件检测方法详解。
玻璃机快速 智能全自动喷水擦窗器 清洁 擦玻璃神器 升级版擦窗机器人
一种擦玻璃器的制作方法
擦玻璃用什么?擦玻璃的方法及技巧?
随便看看
最新动态分享
- 中国传统手工艺之中国结
- 年轻人氪金“爆改”洞洞鞋,鞋花厂商3个月卖出超亿单
- 自用铃木UY125改装明细, 提车一年半,主要用途就是上下班
- 提升使用体验的最佳选择:笔记本配件贴纸和支架推荐
- KIHAL冰淇淋机:专业级压缩机制冷,家庭自制雪糕新体验
- 窗帘挂钩的秘密武器,家居装饰的必备良品!
- 自制红鲤鱼装饰品装饰摆件:红鲤鱼装饰品在家中摆放红鲤鱼装饰品不仅能美化环境
- 合肥滨湖区房价排行榜-滨湖区优质楼盘-新房价格
- 京东618下单用户数再创新高 多类型服务消费快速增长
- 康心到家客户端下载
热点动态分享
- 144062
- 45331
- 44209
- 39830
- 37863
- 29472
- 24526
- 24278
- 20750
- 17795

