基于STM32的智能语音识别分类垃圾桶
智能垃圾桶能识别并分类垃圾,提高垃圾分类效率。 #生活技巧# #家居装饰技巧# #家居智能化推荐#
若该文为原创文章,转载请注明原文出处。
一、 项目背景与引言
(一) 研究背景及意义随着城市化进程加快和人口增长,“垃圾围城”已成为全球性的环境挑战。有效的垃圾分类是实现垃圾减量化、资源化、无害化处理的关键前提。然而,公众普遍存在垃圾分类知识不足、嫌麻烦等问题,导致分类效果不佳。本项目旨在利用嵌入式人工智能技术,设计一款基于STM32的智能语音识别垃圾桶。它能够通过语音指令交互,辅助用户进行正确的垃圾分类,并通过传感器实时监控桶内状态,从而提升垃圾分类的便捷性、准确性与智能化管理水平,对推动环保事业具有积极的现实意义。
(二) 国内外研究现状目前,智能垃圾桶领域的研究主要集中在感应开盖(红外、超声波)、太阳能供电和压缩功能上。随着AIoT技术的发展,部分高端产品开始集成图像识别和语音识别功能。基于图像识别的方案成本较高且计算复杂,而基于特定离线语音识别模块的方案,成本低、响应快、隐私性好,非常适合在本地的嵌入式设备上运行。本项目正是利用此类语音模块,实现一个高性价比、高互动性的智能分类垃圾桶解决方案。
(三) 论文研究内容本研究的主要内容是设计并实现一个以STM32F103C8T6单片机为控制核心的智能分类垃圾桶系统。系统通过LD3320等离线语音识别模块接收用户指令,控制4个垃圾桶盖(通过舵机控制)的开关;通过HC-SR04超声波传感器检测各桶内的满溢程度;通过OLED显示屏进行状态提示;在桶满时通过蜂鸣器报警,最终实现语音交互分类、状态监控、自动提醒的核心功能。
二、 系统总体设计
(一) 系统架构本系统采用模块化设计,以STM32单片机为处理和控制中心,连接语音识别、传感器、执行器、显示和报警模块。
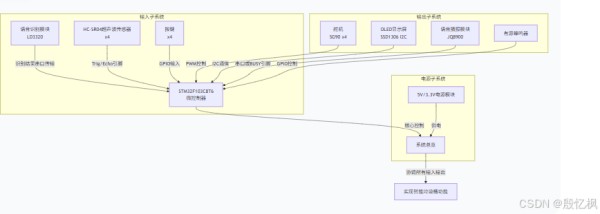
主控模块:流程调度、逻辑控制、指令解析。
语音交互模块:识别用户指令并执行开盖操作,播报提示音。
状态检测模块:检测4个桶内的垃圾高度。
人机交互模块:OLED显示状态,蜂鸣器报警,按键控制。
执行机构模块:舵机控制桶盖的打开和关闭。
三、 硬件设计与实现
(一) 主控模块选型及介绍采用STM32F103C8T6最小系统板。
核心:Cortex-M3内核,72MHz主频,性能充足。
资源:足够多的GPIO口控制4个舵机、4个超声波模块、显示屏、按键等,USART、I2C、定时器等外设完备。
优点:成本极低,社区资源丰富,开发便捷。
(二) 传感器模块选型及电路设计超声波传感器模块:
选型:HC-SR04,性价比高,应用广泛。
数量:4个,分别安装在“可回收”、“厨余”、“有害”、“其他”四个垃圾桶内部顶端,垂直向下检测距离。
电路:每个传感器的Vcc接5V,Gnd接GND,Trig触发引脚和Echo回响引脚分别接STM32的4组GPIO(如Trig1->PA0, Echo1->PA1; Trig2->PA2, Echo2->PA3, 以此类推)。
语音识别模块:
选型:LD3320离线语音识别模块。它不需要联网,可直接在本地识别预先设定的关键词(如“打开可回收垃圾”、“关闭”、“苹果核是什么垃圾”等)。
电路:模块与STM32通过并行总线或SPI接口连接(取决于具体模块型号),接线相对复杂,需参考模块手册。RST、CS、WR、DATA等引脚需连接到STM32的特定GPIO。
(三) 执行模块选型及驱动电路舵机:
选型:SG90微型舵机,扭矩足以打开小型桶盖。
数量:4个。
驱动电路:每个舵机的信号线(橙色/白色)分别接STM32的一个GPIO(如PB6, PB7, PB8, PB9)。注意: 舵机供电必须使用外部5V电源,切勿直接从STM32板载的3.3V或5V取电,否则会导致单片机复位或损坏。
蜂鸣器:
选型:有源蜂鸣器(高电平触发)。
电路:正极通过一个1K电阻接STM32的GPIO(如PC13),负极接GND。
(四) 显示与交互模块OLED显示屏:
选型:0.96寸I2C接口OLED模块(SSD1306)。
接口电路:SCL接PB10,SDA接PB11。
按键:
选型:轻触按键。
电路:一端接GPIO(如PA15),另一端接地。GPIO内部配置为上拉输入模式。
(五) 电源模块设计采用5V 2A以上的直流电源适配器作为总输入。
一路5V直接给4个舵机和语音模块供电。
另一路通过AMS1117-3.3V稳压芯片转换为3.3V,为STM32、OLED、超声波模块等供电。
四、 软件设计与实现
(一) 开发环境搭建IDE:Keil uVision 5
配置工具:STM32CubeMX用于生成初始化代码
库:HAL库或标准外设库
(二) 系统初始化初始化系统时钟、GPIO、I2C、定时器。
初始化OLED,显示开机界面。
初始化语音识别模块,并添加关键词列表(如“可回收”、“厨余”、“有害”、“其他”、“打开”、“关闭”、“帮助”、“电池”、“塑料袋”等)。
播放欢迎语音:“欢迎使用智能垃圾桶,保护环境卫生,人人有责”。
初始化所有舵机至关闭状态。
(三) 软件流程图与逻辑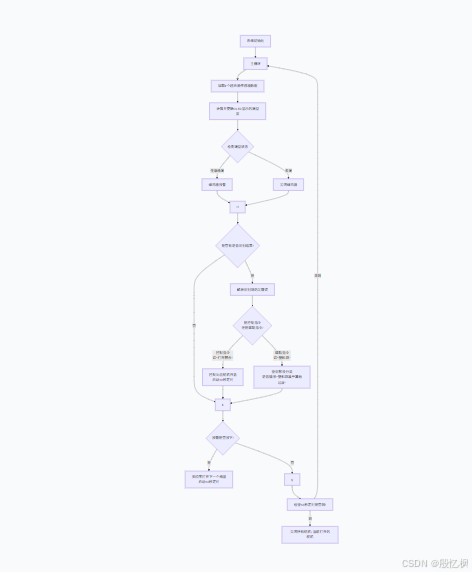
主循环核心逻辑
// main.c
int main() {
// 系统初始化
HAL_Init();
SystemClock_Config();
MX_GPIO_Init();
MX_I2C_Init();
MX_TIM_Init(); // 用于舵机PWM和计时
OLED_Init();
Voice_Module_Init();
Servo_Close_All();
// 播放欢迎语音
Voice_Play_Welcome();
while (1) {
// 1. 读取超声波数据,计算满溢度(0-100%)
for (int i = 0; i < 4; i++) {
fullness[i] = Get_Ultrasonic_Distance(i) / MAX_HEIGHT * 100;
if (fullness[i] > 95) { // 如果满溢度超过95%
bin_full_flag |= (1 << i); // 设置对应桶满的标志位
} else {
bin_full_flag &= ~(1 << i); // 清除标志位
}
}
// 2. 满溢报警
if (bin_full_flag != 0) {
BUZZER_ON();
} else {
BUZZER_OFF();
}
// 3. 处理语音识别结果
if (voice_recognition_flag) {
voice_recognition_flag = 0;
Parse_Voice_Command(recognition_result);
}
// 4. 处理按键
if (HAL_GPIO_ReadPin(KEY_GPIO_Port, KEY_Pin) == GPIO_PIN_RESET) {
HAL_Delay(50); // 消抖
if (HAL_GPIO_ReadPin(KEY_GPIO_Port, KEY_Pin) == GPIO_PIN_RESET) {
current_bin = (current_bin + 1) % 4; // 循环切换到下一个桶
Servo_Open(current_bin); // 打开对应桶盖
auto_close_timer = 100; // 设置10秒定时器 (100 * 100ms)
}
}
// 5. 处理10秒自动关闭
if (auto_close_timer > 0) {
auto_close_timer--;
if (auto_close_timer == 0) {
Servo_Close_All();
}
}
// 6. 刷新OLED显示
OLED_ShowStatus(fullness, bin_full_flag, current_bin_opened);
HAL_Delay(100); // 主循环周期100ms
}
}
语音指令解析函数示例
// voice.c
void Parse_Voice_Command(char* result) {
if (strstr(result, "打开") != NULL) {
if (strstr(result, "可回收") != NULL) {
Servo_Open(BIN_RECYCLABLE);
auto_close_timer = 100;
} else if (strstr(result, "厨余") != NULL) {
Servo_Open(BIN_KITCHEN);
auto_close_timer = 100;
}
// ... 其他桶
} else if (strstr(result, "关闭") != NULL) {
Servo_Close_All();
auto_close_timer = 0;
} else if (strstr(result, "帮助") != NULL || strstr(result, "是什么垃圾") != NULL) {
// 帮助模式,识别具体物品
if (strstr(result, "电池") != NULL) {
Voice_Play_Response("电池属于有害垃圾");
} else if (strstr(result, "苹果核") != NULL) {
Voice_Play_Response("苹果核属于厨余垃圾");
} else if (strstr(result, "塑料袋") != NULL) {
Voice_Play_Response("塑料袋属于其他垃圾");
}
// ... 其他物品
}
}
五、 系统测试与优化
(一) 测试方案单元测试:分别测试舵机转动角度、超声波测距准确性、语音识别率、OLED显示、蜂鸣器发声。
功能测试:
逐一说出“打开XX垃圾”指令,检查对应舵机是否动作。
说出“电池”、“果皮”等物品名称,检查语音回复是否正确。
遮挡超声波传感器,模拟桶满状态,检查蜂鸣器是否报警。
按下按键,检查是否按顺序开盖。
测试10秒后桶盖是否自动关闭。
压力测试:连续快速发出不同指令,测试系统响应稳定性和识别率。
(二) 优化方向识别率优化:调整LD3320的麦克风灵敏度,优化关键词列表(选择差异大的词条),在安静环境下测试。
机械结构优化:设计合理的桶盖连杆机构,确保舵力足够且流畅。
功耗优化:增加人体红外感应模块(HC-SR501),无人时进入低功耗休眠状态,有人靠近再启动语音识别,节省电能。
数据统计:增加ESP8266 WiFi模块,将垃圾投放次数和满溢数据上传到云平台,用于大数据分析。
六、 结论与展望
(一) 项目总结本项目成功设计并实现了一个基于STM32和离线语音识别技术的智能分类垃圾桶原型。系统能够准确响应语音指令,自动打开对应的垃圾桶盖,并能通过语音查询功能辅助用户进行垃圾分类。同时,集成的满溢检测功能有效提醒用户及时清理垃圾,解决了传统垃圾桶的痛点。整个系统成本可控,功能完整,具有良好的交互性和实用性。
(二) 未来展望集成计算机视觉:增加一个摄像头模块,结合轻量化的TensorFlow Lite Micro模型,实现“语音+图像”双模式识别,进一步提高分类准确性和用户体验。
自动打包换袋:设计更为复杂的机械结构,实现垃圾袋的自动封口和更换功能。
太阳能供电:在垃圾桶顶部加装太阳能电池板,结合锂电池管理,实现自供电,适合公园、广场等户外场景部署。
社区物联网络:将区域内所有智能垃圾桶组网,监控中心可以实时查看每个点的状态,规划最优的清运路线,真正实现“智慧环卫”。
如有侵权,或需要完整代码,请及时联系博主。
网址:基于STM32的智能语音识别分类垃圾桶 https://www.yuejiaxmz.com/news/view/1341591
相关内容
基于stm32的智能垃圾桶/语音分类/自动开盖基于STM32的智能语音垃圾桶
【基于STM32单片机智能垃圾桶 语音识别 垃圾分类 WIFI无线蓝牙成品 系统设计(实物+程序+原理图+其他资料)】
基于STM32的智能垃圾分类系统设计
基于单片机的语音识别智能垃圾桶垃圾分类的设计与实现
基于STM32的智能垃圾桶系统设计
基于语音控制的居民小区智能分类垃圾桶设计(单片机、C语言、高质量、STM32)
基于STM32智能垃圾桶设计与实现
基于STM32的智能垃圾桶系统设计与实现(程序+仿真)
Arduino智能语音识别分类垃圾桶
随便看看
最新动态分享
- 包河区置地瑰丽公馆售楼部电话号码(最新认证官方预约电话2026.6.26)
- 分馆动态|“碳”生活易,叹生活难?海珠区图书馆南附分馆用这套模式给出了答案
- 北京搬家必看科普:别把值钱旧货当垃圾丢!老酒、红木、钱币上门回收攻略
- 奢侈品媒体|拉夫劳伦男装封神之作|奢华奢侈媒体
- 家里的废旧物品不要乱扔,几乎什么都可以用到手工制作上
- 旧物巧变身 亲子共护绿一一信阳市光山县特教学校开展创意手工艺品创作评比活动
- 北京家庭处理闲置:选对机构,真的省心又放心
- 片上总线学习之Wishbone
- 国交院举办毕业季跳蚤市场暨国际文化节活动
- 足不出户旧物回收 废物利用
热点动态分享
- 143945
- 45129
- 44130
- 39738
- 37671
- 29292
- 24400
- 24195
- 20601
- 17715

