一种多功能智能绿植养护机器人的制作方法
智能扫地机器人日常清洁维护方法 #生活技巧# #居家生活技巧# #电器维修技巧# #智能电器使用教程#
1.本发明涉及智能机器人领域,用于室内养殖的绿植智能养护。
背景技术:
2.室内绿植花卉种植,越来越受到人们的青睐,不仅可以陶冶情操,同时绿植花草亦可净化空气,进而有效改善室内生态系统。
3.市场上适合室内养殖的绿植花草品种繁多,其中小型绿植便于移动式养护,大型绿植适合定点养护。目前现有绿植养护产品功能较为单一,同时具有使用前提苛刻等不足,如:
①“
智能花盆”不具有自主移动功能,无法实现自主移动式采光、通风等功能;
②
使用时需要将植物草本移植到智能花盆内,而智能花盆规格设计又缺乏具体植物草本生长环境所需的针对性;
③
一机一花草,无法开展一机多花草的智能群体养护模式;
④
智能花盆水肥容量有限,缺乏自适应水肥补给功能等。
4.但绿植花草的室内生长,需要较为精心专业的养护,而快节奏的工作生活,使人们很少具有这样的时间与精力去亲躬养护绿植花草。而一种具有多功能室内可移动式与定点式智能绿植养护机器人的提出,便可轻松有效的解决上述矛盾。
技术实现要素:
5.针对上述产品的不足,本发明在借鉴移动机器人技术的基础上,并结合草本园艺师专业养护经验,立足于绿植花草养护的“系统完备性”,创新性的提出集自主调节温度、湿度、光照以及浇水、施肥、松土等功能于一体的一种可远程与自适应操控相结合的具有室内可移动式或定点式系统化多功能智能绿植养护机器人研究原型,针对不同的绿植花草生长习性与物理特性,采取相应适宜的养护方式:小盆栽
→
移动式养护、大绿植
→
固定式养护。本发明基于物联网控制技术,采用多维度传感器融合技术,实现对室内绿植花草生长状况的实时监控与自适应养护。
6.本发明的技术方案是:
7.一种多功能智能绿植养护机器人,包括自主移动轮式的智能养护机器人主体和养护机器人的充电与水肥基站,其中:
8.智能养护机器人主体包括底板,底板上设有移动与避障模块、智能采光模块、智能浇水模块、智能加湿模块、智能加温模块、智能松土模块、自充电与自补水模块、人机交互模块、主控器、电路转接模块,其中移动与避障模块、智能采光模块、智能浇水模块、智能加湿模块、智能加温模块、智能松土模块、自充电与自补水模块、人机交互模块为绿植养护机器人的功能模块;主控器负责全部机器人的系统控制;电路转接模块连通主控器与传感器并进行通讯;底板上部设有顶板,底板和顶板通过螺母柱连接,底板、顶板、螺母柱为机器人的结构部件,负责机器人组件的固定与连接,主控器、电路转换模块及其他各功能模块设置在两板之间的空间内;
9.充电与水肥基站包括主体机架,主体机架上后端设有基站主控板,主体机架前端
设有基站端无线充电线圈,相同一端的主体机架上还设有红外信标,该充电与水肥基站还包括外部水箱,外部水箱内设有外箱水泵,并与设置在外部水箱顶部的输水管相连接,在外部水箱上还设有水位检测装置,用于检测水箱内的水量。
10.进一步的,移动与避障模块由主动轮、角度传感器、驱动电机、编码盘、超声传感器、超声波传感器信号聚合板、从动轮、摄像头、陀螺仪、微波雷达、主控器、电路转接模块组成,通过驱动电机以及与其固连的主动轮进行驱动,同时辅以从动轮组成四轮系统移动,同时,陀螺仪负责检测机器人当前的前进方向,陀螺仪返回值与角度传感器的返回值进行算法融合,控制当前机器人的运动方向,也保证机器人行进路线趋近一条直线;
11.机器人前后左右各有一个超声传感器,负责检测传感器方向到障碍物的距离,四个超声传感器将信号传输给超声波传感器信号聚合板,经过信号处理后经由电路转接模块传送给主控器,同时为防止运行方向上存在无法被超声传感器检测到的物体,使用摄像头进行辅助探测,根据图像识别算法控制避障;
12.设有微波雷达探测周围活动物体,防止周围有活动的人与动物所造成的环境不确定性从而造成对植物的损伤,当微波雷达探测到周围有活动的物体,就停止一切底盘运动,直到周围静止而后继续运动。
13.进一步的,智能采光模块包括光照传感器和光照盖板,光照传感器与主控器信号连接,当主控器下达采光指令后,主控器会采集光照传感器的光照值,并将后一次采集的光照值与前一次采样的光照值进行比对,确定行进路线,而后会调用移动与避障模块驮载植物向预定路线前进,在前进过程中仍然进行采样,以此来确定合适路线。
14.进一步的,智能浇水模块包括内部水箱、内箱水泵、土壤湿度传感模块,当主控器通过土壤湿度传感模块探测到植物缺水的时候,则会驱动内箱水泵从内部水箱内抽水为植物进行补水,与土壤湿度传感模块信号连接的土壤湿度传感器埋置在花盆内部,通过电路转换模块与机器人相连。
15.进一步的,智能加湿模块包括空气温湿度传感模块和超声波雾化装置,当主控器通过空气温湿度传感模块探测到植物周围环境湿度过低时,会驱动超声波雾化装置为植物进行加湿,与空气温湿度传感模块信号连接的空气温湿度传感器位于植物花盆内部,通过电路转换模块与机器人连接,超声波雾化装置位于内部水箱内,可以使用内部水箱内的水为植物加湿。
16.进一步的,智能加温模块包括与其信号连接的加热丝,当主控器通过空气温湿度传感模块探测到植物周围温度过低时,会驱动埋在土壤附近的加热丝为植物进行加温,加热丝通过电路转换模块与机器人相连接。
17.进一步的,智能松土模块包括与其信号连接的松土电机,主控器通过内置定时,每当到达要松土的时刻,主控器会驱动埋在土里的松土电机,通过震动,为植物进行松土,松土电机通过电路转换模块与机器人相连接。
18.进一步的,自充电与自补水模块包括摄像头、内部水箱、水箱上盖、水位传感器、无线充电线圈、电压传感器、红外传感器、干簧管,当主控器通过水位传感器确定机器人内部水箱缺水,或者通过电压传感器确定机器人电池缺电的时候,会触发返回充电与水肥基站程序,为机器人主体进行充电和补水加肥的操作;
19.当该返回充电与水肥基站程序被触发后,主控器会调用红外传感器,探测基站端
红外信标的相对位置,而后通过移动与避障模块的底盘移动功能,驱动机器人前进到基站的位置,在移动过程中,也会调用摄像头进行路线的确定与规划,在行驶到基站前方时,干簧管会辅助确认机器人的内部水箱的受水口是否与外部水箱的出水口进行对齐;
20.确认对齐后,机器人端的水箱上盖会打开,而后基站端的外箱水泵会从输水管为机器人端的内部水箱进行补水加肥操作,同理若存在电池缺电的情况,则会通过基站端无线充电线圈与机器人主体端的无线充电线圈进行充电。
21.进一步的,机器人主体上顶板上设有触摸屏,用于直观了解当前植物状态,并手动控制机器人立刻或延时对植物进行采光、浇水、加温加湿与松土的操作。
22.进一步的,机器人顶板上设有拓展支架,该拓展支架连接与内部水箱连接的水管,该水管的浇水口伸入到花盆内,花盆一端设有土壤湿度传感器空气温湿度传感器、加热丝、松土电机,为相应的模块提供检测信号。
23.本发明的有益效果是:
24.本发明机器人基于物联网控制技术,通过多维度传感器融合技术,可自行实现对植物的加水、加湿、加温及松土功能,完成对植物的一系列智能管理,实现了对室内绿植花草生长状况的实时监控与自适应养护。
附图说明
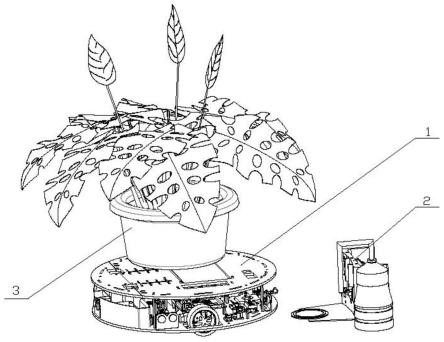
25.图1为本发明绿植养护机器人的组成示意图。
26.图2为本发明绿植养护机器人的主体部分爆炸图。
27.图3为本发明绿植养护机器人的充电与水肥基站部分爆炸图。
28.图4为本发明绿植养护机器人的移动与避障模块组成示意图。
29.图5为本发明绿植养护机器人的智能采光模块组成示意图。
30.图6为本发明绿植养护机器人的智能浇水、加湿、加温、松土模块组成示意图
31.图7为本发明绿植养护机器人的自充电与自补水模块组成示意图。
32.图8为本发明绿植养护机器人的人机交互模块示意图。
33.图9为本发明绿植养护机器人的多盆栽群体照料模式示意图。
具体实施方式
34.参见附图1,本发明多功能智能绿植养护机器人系统由自主移动轮式的智能养护机器人主体1和养护机器人的充电与水肥基站2两部分组成,下面对各组成做进一步说明。
35.1、智能养护机器人主体组成:
36.绿植养护机器人对小型绿植移动养护,利用传感器实时检测植物的状态并为其进行采光、浇水、加温、加湿、松土等;对大型绿植定点养护,进行浇水、加湿、加温等。
37.如图2所示,智能养护机器人主体部分由13个部分组成,包括底板1-13,底板1-13上设有移动与避障模块1-1、智能采光模块1-2、智能浇水模块1-3、智能加湿模块1-4、智能加温模块1-5、智能松土模块1-6、自充电与自补水模块1-7、人机交互模块1-8、主控器1-9、电路转接模块1-10,其中移动与避障模块1-1、智能采光模块1-2、智能浇水模块1-3、智能加湿模块1-4、智能加温模块1-5、智能松土模块1-6、自充电与自补水模块1-7、人机交互模块1-8为绿植养护机器人的功能模块;主控器1-9负责全部机器人的系统控制;电路转接模块
1-10连通主控器1-9与传感器并进行通讯;底板1-13上部设有顶板1-11,底板1-9和顶板1-11通过螺母柱1-12连接,底板1-13、顶板1-11、螺母柱1-12为机器人的结构部件,负责机器人组件的固定与连接,主控器1-9、电路转换模块1-10及其他各功能模块设置在两板之间的空间内。
38.2、养护机器人充电水肥基站组成
39.参见附图3,充电与水肥基站2包括主体机架2-2,主体机架2-2上后端设有基站主控板2-1,主体机架前端设有基站端无线充电线圈2-4,相同一端的主体机架2-2上还设有红外信标2-3。该充电与水肥基站2还包括外部水箱2-7,外部水箱2-7内设有外箱水泵2-6,并与设置在外部水箱2-7顶部的输水管2-8相连接,在外部水箱2-7上还设有水位检测装置2-5,用于检测水箱内的水量。充电与水肥基站的作用是为绿植养护机器人主体进行充电与补水添肥的操作,其作用是辅助绿植养护机器人主体,并为其提供可持续使用的保障。
40.充电与水肥基站2固定于室内的一角,由市电为其供电,同时外部水箱2-7连接市政供水管道,由用户手动将水溶性肥料添加至该水箱内部,当养护机器人需要补水操作时,外箱水泵2-6将水肥溶液通过输水管2-8输送到附图6所示的机器人的内部水箱1-3-1。
41.以下根据不同组件,分别对各功能模块的组成及控制策略做出说明:
42.1、移动与避障模块
43.附图4示出了本发明移动与避障模块1-1组成示意图。室内智能绿植养护机器人最重要的功能为移动功能。其主要功能是驱动机器人以及上方驮载的花盆进行移动。如图4所示,移动与避障模块1-1由主动轮1-1-1、角度传感器1-1-2、驱动电机1-1-3、编码盘1-1-4、超声传感器1-1-5、超声波传感器信号聚合板1-1-6、从动轮1-1-7、摄像头1-1-8、陀螺仪1-1-9、微波雷达1-1-10、主控器1-9、电路转接模块1-10组成,其主要是通过驱动电机1-1-3以及与其固连的主动轮1-1-1进行驱动,同时辅以从动轮1-1-7组成四轮系统移动。同时,陀螺仪1-1-9负责检测机器人当前的前进方向,陀螺仪1-1-9返回值与角度传感器1-1-2的返回值进行算法融合,控制当前机器人的运动方向,也保证机器人行进路线趋近一条直线。
44.为了防止机器人在运动过程中发生碰撞,机器人前后左右各有一个超声传感器1-1-5,负责检测传感器方向到障碍物的距离,四个超声传感器1-1-5将信号传输给超声波传感器信号聚合板1-1-6,经过信号处理后经由电路转接模块1-10传送给主控器1-9。同时为防止运行方向上存在无法被超声传感器1-1-5检测到的物体,故使用摄像头1-1-8进行辅助探测,根据图像识别算法控制避障。
45.为了防止周围有活动的人与动物所造成的环境不确定性从而造成对植物的损伤,机器人拥有微波雷达1-1-10,系统被设计为只要当微波雷达1-1-10探测到周围有活动的物体,就停止一切底盘运动,直到周围静止而后继续运动。
46.2、智能采光模块
47.如图5所示,智能采光模块1-2包括光照传感器1-2-1和光照盖板1-2-2。当主控器1-9下达采光指令后,主控器1-9会采集光照传感器1-2-1的光照值,并与上一次采样的光照值进行比对,确定行进路线,而后会调用移动与避障模块1-1驮载植物向预定路线前进,在前进过程中仍然进行采样,以此来确定合适路线。
48.需要说明的是,本采光功能并不仅仅是驱动智能绿植养护机器人驮载植物前往光照充足的地方,当主控器1-9判别到当前植物温度过高,或者是光照过强的时候,则会采取
避光策略,驱动植物前往光照适宜的位置。
49.同时,如果用户想要主动搬运花盆到达某一地方,也可以使用智能终端设备(如智能手机或电脑等)通过远程遥控的方式向主控器1-9下达命令,即可实现人为控制移动。
50.3、智能浇水模块
51.参见附图6,智能浇水模块1-3包括内部水箱1-3-1、内箱水泵1-3-2、土壤湿度传感模块1-3-3,当主控器1-9通过土壤湿度传感模块1-3-3探测到植物缺水的时候,则会驱动内箱水泵1-3-2从内部水箱1-3-1内抽水为植物进行补水。与土壤湿度传感模块1-3-3信号连接的土壤湿度传感器4-2(见附图9)埋置在花盆内部,通过电路转换模块1-10与机器人相连。
52.需要进行说明的是,在补水前,主控器1-9会率先查询天气预报,若未来无降水,则再根据当前情况与用户设置决定是否浇水。
53.4、智能加湿模块
54.参见附图6,智能加湿模块1-4包括空气温湿度传感模块1-4-1和超声波雾化装置1-4-2,当主控器1-9通过空气温湿度传感模块1-4-1探测到植物周围环境湿度过低时,会驱动超声波雾化装置1-4-2为植物进行加湿,与空气温湿度传感模块1-4-1信号连接的空气温湿度传感器4-3(见附图9)位于植物花盆内部,通过电路转换模块1-10与机器人连接,超声波雾化装置1-4-2位于内部水箱1-3-1内,可以使用内部水箱1-3-1内的水为植物加湿。
55.需要说明的是,在加湿前,主控器1-9会率先查询天气预报以及当前环境湿度,根据当前情况与用户设置决定是否为植物进行加湿。
56.5、智能加温模块
57.参见附图6,智能加温模块1-5包括与其信号连接的加热丝4-4(见附图9),当主控器1-9通过空气温湿度传感模块1-4-1探测到植物周围温度过低时,会驱动埋在土壤附近的加热丝4-4为植物进行加温,加热丝4-4通过电路转换模块1-10与机器人相连接。
58.需要说明的是,在加温前,主控器1-9会率先查询天气预报以及当前室外温度以及电池电量,根据当前情况与用户设置决定是否为植物进行加温。
59.6、智能松土模块
60.参见附图6,智能松土模块1-6包括与其信号连接的松土电机5-5(见附图9),主控器1-9通过内置定时,每当到达要松土的时刻,主控器1-9会驱动埋在土里的松土电机5-5,通过震动,为植物进行松土,松土电机5-5通过电路转换模块1-10与机器人相连接。
61.7、自充电与自补水模块
62.如图7所示,自充电与自补水模块1-7包括摄像头1-1-8、内部水箱1-3-1、水箱上盖1-7-1、水位传感器1-7-2、无线充电线圈1-7-3、电压传感器1-7-4、红外传感器1-7-5、干簧管1-7-6,当主控器1-9通过水位传感器1-7-2确定机器人内部水箱1-3-1缺水,或者通过电压传感器1-7-4确定机器人电池缺电的时候,会触发返回充电与水肥基站程序,为机器人主体进行充电和补水加肥的操作。
63.当该返回充电与水肥基站程序被触发后,主控器1-9会调用红外传感器1-7-5,探测基站端红外信标2-3的相对位置,而后通过移动与避障模块1-1的底盘移动功能,驱动机器人前进到基站的位置,在移动过程中,也会调用摄像头1-1-8进行路线的确定与规划。在行驶到基站前方时,干簧管1-7-6会辅助确认机器人的内部水箱1-3-1的受水口是否与外部
水箱2-7的出水口进行对齐。
64.确认对齐后,机器人端的水箱上盖1-7-1会打开,而后基站端的外箱水泵2-6会从输水管2-8为机器人端的内部水箱1-3-1进行补水加肥操作,同理若存在电池缺电的情况,则会通过基站端无线充电线圈2-4与机器人主体端的无线充电线圈1-7-3进行充电。
65.8、人机交互模块
66.如图8所示,为了便于用户对系统参数的修改以及对植物状态指标的监看,机器人主体上顶板1-11上设有触摸屏1-8,同时系统也拥有参数修改与参数显示功能,用户可以很直观的通过触摸屏1-8对当前植物状态有了解,同时也可以手动控制机器人立刻或延时对植物进行采光、浇水、加温加湿与松土等操作。
67.同时,主控器1-9拥有联网功能,用户也可以在任意一台联网的智能终端(手机、计算机、智能音箱等)进行监看与参数设置等操作。
68.9、多盆栽群体照料模式
69.若绿植养护机器人需要照料的盆栽重量过重,或者是需要一次性照顾多盆植物的时候,用户可开启多盆栽群体照料模式,参见附图9,在这个模式下,机器人上方会安装拓展支架4-1,该拓展支架4-1连接与内部水箱1-3-1连接的水管,该水管的浇水口4-6伸入到花盆内。花盆一端设有土壤湿度传感器4-2空气温湿度传感器4-3、加热丝4-4、松土电机5-5,为相应的模块提供检测信号。
70.盆栽会固定于室内的某一处位置,由用户通过触摸屏或智能控制终端中进行标注,机器人会根据移动与避障模块的返回值以及摄像头的图像识别,行驶到植物旁边,通过rfid模块4-5读取位于花盆底部的rfid线圈3-1进行识别,确定当前需要养护植物的信息,并根据花盆内传感器的返回值确定是否需要浇水、加温与加湿,并进行相应的操作,而后机器人会行驶到下一盆栽处进行检测,如此反复,直到将所有盆栽全部遍历之后停止,进入待机状态。
71.本发明绿植养护机器人对室内绿植具有可通过5g网络实现远程控制或根据预设专家养护系统实现自适应智能控制的养护功能:移动式采光与浇水施肥、加温、加湿、松土。即可载动小型绿植实现上述功能,亦可通过自身携带的浇水系统,实现地点浇水施肥。机器本身拥有gui用户操作界面以及联网功能,可以根据不同植物的环境需求以及未来的天气情况动态调节植物最优环境阈值。同时,用户也可以通过触摸屏或智能终端与机器人进行逻辑交互,修改参数或者实时监控植物生长状态。机器人内部拥有储水箱,可以储存一定的水用于浇水和加湿。如果检测到水位过低时,机器人可以与基站进行通讯并通过基站进行定位,进而返回基站进行补水操作;同理,当机器人探测到电池电量不足,也可以返回基站进行无线充电的操作。
网址:一种多功能智能绿植养护机器人的制作方法 https://www.yuejiaxmz.com/news/view/381967
相关内容
城市绿化智能化养护系统的制作方法家庭智能植物养护系统的制作方法
智能绿化机器人的制作方法
多功能扫地机器人的制作方法
一种基于立体绿化的智能控制装置及其可视化控制系统的制作方法
多功能扫地机器人的设计及制作
一种家庭安全防护机器人的制作方法
各种绿植的养护方法 常见绿植养护方法
室内绿植种植与养护.pptx
基于物联网的智能绿化养护的方法及系统与流程
随便看看
最新动态分享
- 好设计点亮居家生活!家装沙龙助力业主打造理想家园
- 居家生活设计意图怎么写
- 居家适老化设计:让父母的晚年生活,安全又有温度
- 居家软装布置生活美学设计
- 成都【麓湖生态城C17青鸾屿】售楼电话
- 第三单元 居家生活防意外教学设计
- 我的居家设计花园生活游戏下载
- 成都【银河天悦云境】售楼处电话(最新已核验) | 8月参考总价一览 | 在售主力户型 | 优惠活动详情 | 特价房源 | 楼盘信息更新
- 《2026小红书年度居住趋势》发布:居住方式进入“适我时代”
- Decor Life
热点动态分享
- 145138
- 52597
- 45162
- 42525
- 40970
- 30939
- 25777
- 25550
- 21946
- 18679

