自动烹饪系统的制作方法
参加烹饪课程,系统学习地方特色菜的制作方法 #生活乐趣# #美食烹饪乐趣# #地方特色菜#
本申请涉及一种自动烹饪系统,属于自动控制技术领域。
背景技术:
随着经济的进步和社会的发展,人们对于生活中自动化、智能化的需求越来越高,而这种需求在厨房电器设备上的体现即是人们对于自动化烹饪设备的需求,人们渴望通过自动化烹饪设备将自己从繁琐又满是油烟的烹饪过程中解救出来。因此,自动烹饪机应运而生。
然而,现有技术中的自动烹饪机需要人工将配菜洗好、并放置在指定容器或者位置,仍在很大程度上依赖于人工、自动化程度比较低。
技术实现要素:
本申请提供了一种自动烹饪系统,可以解决现有的烹饪方式仍需人工参与,烹饪效率较低的问题。本申请提供如下技术方案:
控制终端,用于获取用户的烹饪需求;基于所述烹饪需求生成配菜信息和制作信息;将所述配菜信息发送至移动装置,并将所述制作信息发送至自动切菜装置和自动烹饪装置;
所述移动装置,用于获取所述配菜信息;在智能冰箱中获取所述配菜信息指示的目标配菜;将所述目标配菜移动至自动洗菜装置;并向所述自动洗菜装置发送第一开始信号;
所述自动洗菜装置,用于在接收到所述第一开始信号时对所述目标配菜进行自动清洗;并在清洗完成后向所述移动装置发送第一结束信号;
所述移动装置,用于在接收到所述第一结束信号时,将所述自动洗菜装置中的目标配菜放入所述自动切菜装置中;向所述自动切菜装置发送第二开始信号;
所述自动切菜装置,用于在接收到所述第二开始信号时,根据所述制作信息确定切割方式;使用所述切割方式对所述目标配菜进行切割;在切割完成后向所述移动装置发送第二结束信号;
所述移动装置,用于在接收到所述第二结束信号时,将所述自动切菜装置中的目标配菜放入所述自动烹饪装置中;向所述自动烹饪装置发送第三开始信号;
所述自动烹饪装置,用于在接收到所述第三开始信号时,根据所述配菜信息指示的烹饪方式对所述目标配菜进行烹饪,在烹饪结束后向所述移动装置发送第三结束信号;
所述移动装置,用于在接收到所述第三结束信号时,从橱柜中取出用于容纳烹饪后的目标配菜的目标餐具;并将所述烹饪后的目标配菜放入所述目标餐具中;在到达用餐时间时,将放置有所述烹饪后的目标配菜的目标餐具放置在餐桌上。
可选地,所述系统还包括自动吸油烟装置;
所述自动烹饪装置,还用于在自动烹饪过程中,在加入食用油后若油温达到温度阈值,则向所述自动吸油烟装置发送第四开始信号;在烹饪结束后向所述自动吸油烟装置发送第四结束信号;
所述自动吸油烟装置,用于在接收到所述第四开始信号时启动;在接收到所述第四结束信号时停止。
可选地,所述自动烹饪装置包括:控制器、锅体、加热装置、用于伸入所述锅体中翻烹饪品的烹饪臂、用于向所述锅体中加入固体调料的固体调料装置、和用于向所述锅体中加入液体调料的液体调料装置;所述烹饪臂、所述加热装置、所述固体调料装置和所述液体调料装置分别与所述控制器电连接。
可选地,所述系统还包括自动洗碗装置;
所述控制终端,还用于获取用户的清洗请求;向所述移动装置发送清洗信号;
所述移动装置,还用于接收所述清洗信号;将所述清洗信号指示的待清洗餐具放入所述自动洗碗装置,向所述自动洗碗装置发送第五开始信号;
所述自动洗碗装置,用于在接收到所述第五开始信号时对所述待清洗餐具进行清洗;在清洗结束后向所述移动装置发送第五结束信号;
所述移动装置,还用于在接收到所述第五结束信号时,将清洗完的餐具放入所述橱柜中。
可选地,所述移动装置具有图像采集和图像识别功能,所述移动装置,具体用于:
对所述智能冰箱中的配菜进行图像采集,得到目标图像;
对所述目标图像进行图像识别,确定与所述配菜信息相匹配的目标配菜。
可选地,所述移动装置上设置有控制器和与所述控制器相连的机械手臂,所述机械手臂用于根据控制器的控制执行拿取、放置和倾倒操作。
可选地,所述移动装置上设置有距离传感器,所述距离传感器用于感应预设距离内是否存在障碍目标;所述移动装置还用于在所述预设距离内存在所述障碍目标时执行避障操作。
可选地,所述移动装置上设置有音频播放装置,所述音频播放装置用于输出语音提醒信息。
本申请的有益效果在于:通过设置控制终端、移动装置、自动洗菜装置、自动切菜装置和自动烹饪装置,在控制终端的控制下通过移动装置实现全自动的烹饪服务,可以解决现有的烹饪方式仍需人工参与,烹饪效率较低的问题;由于可以实现全自动地烹饪服务,因此,可以提高自动烹饪效率。
上述说明仅是本申请技术方案的概述,为了能够更清楚了解本申请的技术手段,并可依照说明书的内容予以实施,以下以本申请的较佳实施例并配合附图详细说明如后。
附图说明
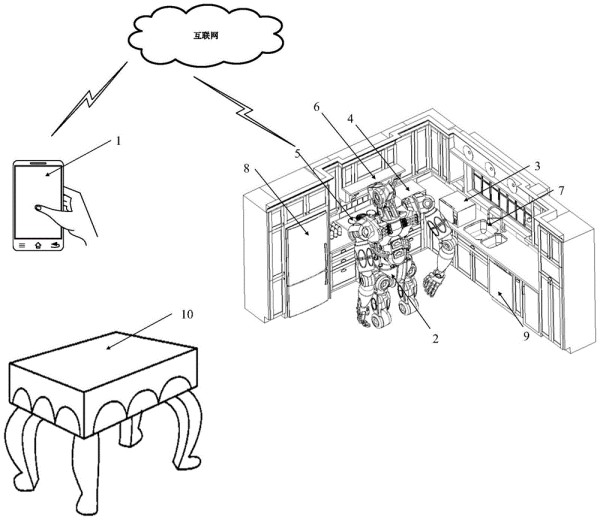
图1是本申请一个实施例提供的自动烹饪系统的结构示意图。
具体实施方式
下面结合附图和实施例,对本申请的具体实施方式作进一步详细描述。以下实施例用于说明本申请,但不用来限制本申请的范围。
图1是本申请一个实施例提供的自动烹饪系统的结构示意图,如图1所示,该系统至少包括:控制终端1、移动装置2、自动洗菜装置3、自动切菜装置4、自动烹饪装置5、自动吸油烟装置6、自动洗碗装置7、智能冰箱8、橱柜9和餐桌10。
其中,控制终端1、移动装置2、自动洗菜装置3、自动切菜装置4、自动烹饪装置5、自动吸油烟装置6和自动洗碗装置7之间互相通信相连。
控制终端1可以为手机、平板电脑、计算机等电子设备,本实施例不对控制终端1的类型作限定。控制终端1中安装有自动烹饪程序,用户通过该自动烹饪程序输入烹饪需求。
控制终端1,用于获取用户的烹饪需求;基于烹饪需求生成配菜信息和制作信息;将配菜信息发送至移动装置2,并将制作信息发送至自动切菜装置4和自动烹饪装置5。
其中,烹饪需求包括:菜单、菜名、口味偏好和/或分量等信息;配菜信息包括制作对应菜名的配菜(包括主材、辅材和配料等)和配菜的分量等信息;制作信息包括烹饪方式(比如:蒸、煮、炸、炒等方式)和配菜的切割方式。
可选地,控制终端1存储有不同烹饪需求与配菜信息和制作信息之间的对应关系;或者,控制终端1中的存储有配菜信息和制作信息的生成算法,该生成算法可以是深度学习网络模型,该深度学习网络模型预先通过样本数据训练得到。
可选地,移动装置2上设置有控制器、与控制器通信相连的移动组件、机械手臂和图像采集组件。
其中,移动组件用于在控制器的控制下带动移动装置2整体进行移动。机械手臂用于在控制器的控制下执行拿取、放置和倾倒等与烹饪相关的操作。
移动装置2,用于获取配菜信息;在智能冰箱8中获取配菜信息指示的目标配菜;将目标配菜移动至自动洗菜装置3;并向自动洗菜装置3发送第一开始信号。
可选地,移动装置2在智能冰箱8中获取目标配菜,包括:对智能冰箱8中的配菜进行图像采集,得到目标图像;对目标图像进行图像识别,确定与配菜信息相匹配的目标配菜。
其中,图像识别的方式可以是基于深度学习神经网络模型得到的图像识别算法。
可选地,移动装置2将目标配菜移动至自动洗菜装置3,包括:在获取到目标配菜之后,通过定位算法确定自动洗菜装置3的位置;通过机械手臂将目标配菜放置在自动洗菜装置3中。
其中,定位算法可以是声波定位、激光定位或者通过二维码识别方式进行定位,本实施例不对定位算法的类型作限定。
自动洗菜装置3用于提供自动洗菜功能。比如:申请号为201610423656.3的发明专利《自动洗菜机》、申请号为:201821836604.x的实用新型专利《自动洗菜机》等,本实施例不对自动洗菜装置3的类型作限定。本申请中,自动洗菜装置3包括控制器和通信组件。通信组件用于接收和发送信号,比如:接收移动装置2发送的第一开始信号,向移动装置2发送第一结束信号等。控制器用于根据通信组件接收到的信号执行启动操作。
自动洗菜装置3,用于在接收到第一开始信号时对目标配菜进行自动清洗;并在清洗完成后向移动装置发送第一结束信号。
相应地,移动装置2,用于在接收到第一结束信号时,将自动洗菜装置3中的目标配菜放入自动切菜装置4中;向自动切菜装置4发送第二开始信号。
可选地,移动装置2将自动洗菜装置3中的目标配菜放入自动切菜装置4中,包括:在获取到目标配菜之后,通过定位算法确定自动切菜装置4的位置;通过机械手臂将目标配菜放置在定自动切菜装置4中。
其中,定位算法可以是声波定位、激光定位或者通过二维码识别方式进行定位,本实施例不对定位算法的类型作限定。需要补充说明的是,在使用二维码识别方式作为定位算法时,不同设备的二维码不同。
可选地,自动切菜装置4用于对目标配菜进行切割。比如:申请号为201610836628.4的发明专利《201610836628.4》、申请号为201711272284.x的发明专利《一种自动切菜机》等,本实施例不对自动切菜装置4的类型作限定。本申请中,自动洗菜装置4包括控制器和通信组件。通信组件用于接收和发送信号,比如:接收移动装置2发送的第二开始信号,向移动装置2发送第二结束信号等。控制器用于根据通信组件接收到的信号执行启动操作。
自动切菜装置4,用于在接收到第二开始信号时,根据制作信息确定切割方式;使用切割方式对目标配菜进行切割;在切割完成后向移动装置发送第二结束信号。
相应地,移动装置2,用于在接收到第二结束信号时,将自动切菜装置4中的目标配菜放入自动烹饪装置5中;向自动烹饪装置5发送第三开始信号。
可选地,移动装置2将自动切菜装置4中的目标配菜放入自动烹饪装置5中,包括:在获取到目标配菜之后,通过定位算法确定自动烹饪装置5的位置;通过机械手臂将目标配菜放置在自动烹饪装置5中。
其中,定位算法可以是声波定位、激光定位或者通过二维码识别方式进行定位,本实施例不对定位算法的类型作限定。
可选地,自动烹饪装置5,包括:控制器、锅体、加热装置、用于伸入锅体中翻烹饪品的烹饪臂、用于向锅体中加入固体调料的固体调料装置、和用于向锅体中加入液体调料的液体调料装置;烹饪臂、加热装置、固体调料装置和液体调料装置分别与控制器电连接。控制器还连接有通信组件,通信组件用于接收和发送信号,比如:接收移动装置2发送的第三开始信号,向移动装置2发送第三结束信号等。控制器用于根据通信组件接收到的信号执行启动操作。
自动烹饪装置5,用于在接收到第三开始信号时,根据配菜信息指示的烹饪方式对目标配菜进行烹饪,在烹饪结束后向移动装置2发送第三结束信号。
相应地,移动装置2,用于在接收到第三结束信号时,从橱柜9中取出用于容纳烹饪后的目标配菜的目标餐具;并将烹饪后的目标配菜放入目标餐具中;在到达用餐时间时,将放置有烹饪后的目标配菜的目标餐具放置在餐桌10上。
可选地,移动装置2从橱柜9中取出用于容纳烹饪后的目标配菜的目标餐具,包括:通过定位算法确定橱柜9的位置;通过机械手臂将目标配菜放置在自动烹饪装置5中。移动装置2将放置有烹饪后的目标配菜的目标餐具放置在餐桌10上,包括:通过定位算法确定餐桌10的位置;通过机械手臂将放置有烹饪后的目标配菜的目标餐具放置在餐桌10上。
可选地,自动烹饪装置5,还用于在自动烹饪过程中,在加入食用油后若油温达到温度阈值,则向自动吸油烟装置6发送第四开始信号;在烹饪结束后向自动吸油烟装置6发送第四结束信号。
可选地,自动吸油烟装置6用于进行自动吸油烟。比如:申请号为201820740533.7的发明专利《自动吸油烟机》、申请号为201610319541.x的发明专利《一种吸油烟机》等,本实施例不对自动吸油烟装置6的类型作限定。本申请中,自动吸油烟装置6包括控制器和通信组件。通信组件用于接收和发送信号,比如:接收自动烹饪装置5发送的第四开始信号和第四结束信号。控制器用于根据通信组件接收到的信号执行启动和关闭操作。
自动吸油烟装置6,用于在接收到第四开始信号时启动;在接收到第四结束信号时停止。
可选地,控制终端1,还用于获取用户的清洗请求;向移动装置2发送清洗信号。其中,清洗请求用于请求自动清洗餐具。
移动装置2,还用于接收清洗信号;将清洗信号指示的待清洗餐具放入自动洗碗装置7,向自动洗碗装置7发送第五开始信号。
可选地,移动装置2将清洗信号指示的待清洗餐具放入自动洗碗装置7,包括:通过定位算法确定自动洗碗装置7的位置;通过机械手臂将待清洗餐具放置在自动洗碗装置7中。
可选地,自动洗碗装置7用于对餐具进行自动清洗。比如:申请号为201811654912.5的发明专利《自动洗碗机》、申请号为201811613794.3的发明专利《一种自动洗碗机》等,本实施例不对自动洗碗装置7的类型作限定。本申请中,自动洗碗装置7包括控制器和通信组件。通信组件用于接收和发送信号,比如:接收移动装置2发送的第五开始信号,向移动装置2发送第五结束信号。控制器用于根据通信组件接收到的信号执行启动操作。
自动洗碗装置7,用于在接收到第五开始信号时对待清洗餐具进行清洗;在清洗结束后向移动装置发送第五结束信号。
相应地,移动装置2,还用于在接收到第五结束信号时,将清洗完的餐具放入橱柜9中。
可选地,移动装置2上还设置有与控制器相连的距离传感器,距离传感器用于感应预设距离内是否存在障碍目标;移动装置还用于在预设距离内存在障碍目标时执行避障操作。
可选地,移动装置2上设置有音频播放装置,音频播放装置用于输出语音提醒信息。比如:输出避障语音提醒。
综上所述,本实施例提供的自动烹饪系统,通过设置控制终端、移动装置、自动洗菜装置、自动切菜装置和自动烹饪装置,在控制终端的控制下通过移动装置实现全自动的烹饪服务,可以解决现有的烹饪方式仍需人工参与,烹饪效率较低的问题;由于可以实现全自动地烹饪服务,因此,可以提高自动烹饪效率。
以上所述实施例的各技术特征可以进行任意的组合,为使描述简洁,未对上述实施例中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为是本说明书记载的范围。
以上所述实施例仅表达了本申请的几种实施方式,其描述较为具体和详细,但并不能因此而理解为对发明专利范围的限制。应当指出的是,对于本领域的普通技术人员来说,在不脱离本申请构思的前提下,还可以做出若干变形和改进,这些都属于本申请的保护范围。因此,本申请专利的保护范围应以所附权利要求为准。
网址:自动烹饪系统的制作方法 https://www.yuejiaxmz.com/news/view/952081
相关内容
一种智能烹饪系统的制作方法自动化烹饪设备、系统及方法.pdf
食物营养分析及烹饪系统的制作方法
自动烹饪系统及其应用.docx
连续烹饪装置及自动化烹饪系统.pdf
一种智能烹饪系统及烹饪方法与流程
自动烹饪方法与流程
一种DIY智能烹饪控制方法及系统与流程
烹饪机器人自动化系统
原料存储及烹饪自动化机器人的制作方法
随便看看
最新动态分享
- 任职知名大厂、年薪超50万仍想“多赚钱改善生活”,3名研究生兼职当黑客被抓
- 在女性黑客松上,看见AI硬件的另一种可能
- 境外黑客制作假页面窃取敏感数据
- 安联人寿遭黑客攻击,客户信息被泄露
- 某企员工用搜索引擎下载软件 不慎落入境外黑客窃密陷阱
- 亚马逊报告:黑客利用AI工具五周内攻破全球超600个防火墙
- 从0到1孵化AI创意,黑客松顶尖高校联赛落下帷幕
- 一场黑客松背后,上海正形成更多AI创业“连接器”
- 工作模拟游戏推荐哪个 最新工作模拟游戏精选
- 黑客游戏哪个最好玩 十大必玩黑客游戏排行榜
热点动态分享
- 143811
- 44381
- 43995
- 39577
- 37248
- 28984
- 24193
- 24035
- 20344
- 17559

