逆运动学求解与应用
理解运动的心理适应期,不急于求成 #生活技巧# #健身锻炼技巧# #运动心理学#
1、在机器人实际应用中,逆运动学往往更有用,这里可参看:http://blog.sina.com.cn/s/blog_131fa47b20102whij.html(选中后,右键转到.....)。机器人学导论中第三章和第四章亦可见。
2、逆运动学:如果知道一个物体的笛卡尔坐标位姿,那么机器人需要怎样的关节坐标才能接近这个物体。
以下主要说明 一般逆解不唯一:
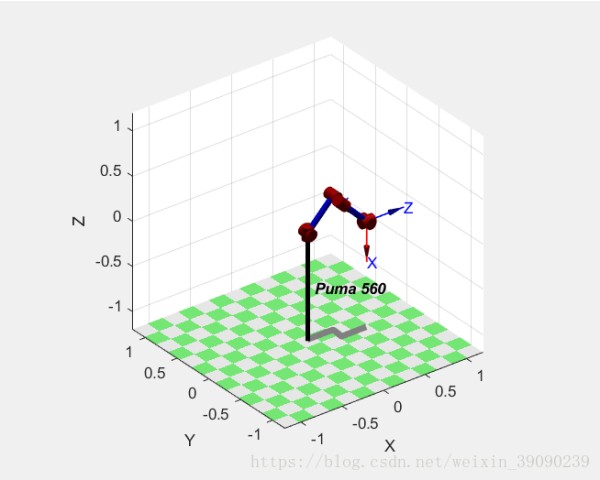
以PUMA560模型为例(mdl_puma560),先定义一个位姿状态,有正解函数fkine( )得末端位姿.---
qn---->(0,pi/4,-pi,0,pi/4,0)%机器人标准状态(关节坐标)
qn =
0 0.7854 3.1416 0 0.7854 0
T=p560.fkine(qn) %对应的机器人末端位姿
T =
-0.0000 0.0000 1.0000 0.5963
-0.0000 1.0000 -0.0000 -0.1501
-1.0000 -0.0000 -0.0000 -0.0144
0 0 0 1.0000
这样先由qn的标准状态得到末端位姿(用正运动学解函数fkine(qn)),再用ikine6s的方法来计算逆运动学的封闭解。所以要实现末端位姿T,所需的关节坐标为
qi=p560.ikine6s(T) %由逆解函数ikine6s( )---工具箱解析法函数求出,与函数ikine( )数值法不同,可以打开查看具体代码
qi =
2.6486 -3.9270 0.0940 2.5326 0.9743 0.373 %与标准关节坐标值不一样
同样的,T1=p560.fkine(qi) %对应的末端位姿 与qn确定的一样。
T1 =
-0.0000 0.0000 1.0000 0.5963
0.0000 1.0000 -0.0000 -0.1500
-1.0000 0.0000 -0.0000 -0.0144
0 0 0 1.0000
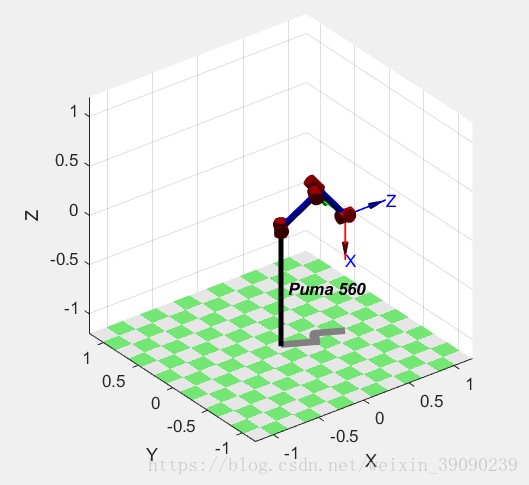
即:不同的关节坐标得到了同样的末端位姿————封闭解不唯一。
画出观察(注意影子): p560.plot(qn) —————————————————— p560.plot(qi)
以上是逆运动学求解由工具箱函数实现,在实际逆运动学求解方法中有数值解法和封闭解法两种。
数值解:迭代求解的方式,求解速度慢;优势在于它能够求解处于奇异位形以及非6关节型的机械臂。
封闭解:一般是针对像PUMA机器人一样的,拥有六个旋转关节的操作臂(存在几个正交关节轴或者多个关节扭转角为0或pi)进行的基于解析形式的解法,或者指对于不高于四次多项式不用迭达便可完成求解。过程中使用的代数法和几何法。(在参看的博文中有)
网址:逆运动学求解与应用 https://www.yuejiaxmz.com/news/view/960053
相关内容
逆向运动健身法Matlab机器人工具箱(1)——机器人的建立、绘制与正逆运动学
如何在育儿中运用心理学,破解孩子的逆反行为?
逆境中的求生与成长策略:短期、中期与长期的应对之道
解密塔罗牌节制逆位:深度解析与全景指南
应激与运动:如何通过运动缓解压力?
运用动力学特征解答圆周运动问题的思路方法及例析
科学运用体育运动缓解压力
高三学生缓解压力的有效方法 看学渣如何逆袭上重点大学
塔罗牌皇帝逆位:解读及影响分析
随便看看
最新动态分享
- 适合搭配的食材
- 食疗养生大全:67种天然食材搭配与食疗方,吃出健康好气色
- 哪些食材可以搭配食用 十对最佳食材搭配好吃又健康
- 壮阳补肾煲汤大全:中药配方与食材搭配全解析
- 广东鱼肚汤的家常做法大全|营养功效+食材搭配+5种经典汤谱(附详细步骤)
- 四季美容养颜豆浆配方大全|天然食材搭配+科学原理,喝出透亮肌
- 零失败家常小炒菜谱大全(附新手必学技巧+食材搭配指南)
- 补肾食谱大全:10种家常食疗方+食材清单,科学搭配提升肾动力
- 5种营养搭配!家常鸡汤快手做法大全(附不同做法+食材禁忌)
- 麻辣香锅食材菜单大全图
热点动态分享
- 144599
- 47802
- 44625
- 40402
- 40316
- 30625
- 25139
- 25017
- 21609
- 18306

