自移动设备、及自移动设备的控制方法与流程
智能家居借助移动设备,实现远程控制与自动化管理 #生活知识# #生活感悟# #科技生活变迁# #移动互联网#
本发明涉及智能控制领域,尤其涉及一种自移动设备、及自移动设备的控制方法。
背景技术:
1、割草机器人在割草时,会出现这样一些工况:例如在平地上运行、在坡地运行时的上坡和下坡、以及无法正常运行,其中,无法正常运行包括割草机器人被障碍物阻挡、运行时被缠住、出现故障等情况。当割草机器人无法正常运行时,电机的输出功率会增大,基于输出功率增大可判断割草机器人的运行出现问题。在实现本发明过程中,发明人发现这样的判断会带来误识别的问题,原因包括:
2、在割草机器人上坡时,为了维持在平地上运行的速度,电机的输出功率也需要增大,会误判为该功率增大是因为割草机器人出现了问题;
3、在割草机器人下坡时,为了维持在平地上运行的速度,电机的输出功率需要减小,若机器人一边下坡一边被缠住,功率的减小部分掩盖了机器人遇到障碍的问题,使得判断的灵敏度降低。
4、综上,这些现状使得判断割草机器人的运行状态存在误识别的问题。
技术实现思路
1、为解决上述的现有技术问题中的至少其一,本发明的目的在于提供一种更准确判断运行状态的自移动设备的控制方法及自移动设备。
2、为实现上述发明目的,本发明一实施方式提供一种自移动设备的控制方法,所述控制方法包括如下步骤:
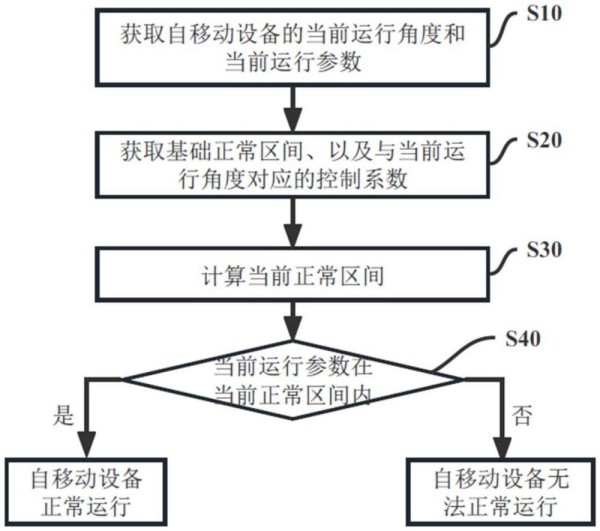
3、获取自移动设备的当前运行角度和当前运行参数,其中,所述当前运行角度是所述自移动设备的运动方向与水平面的夹角;
4、获取基础正常区间、以及与所述当前运行角度对应的控制系数;
5、根据所述基础正常区间、当前运行角度及对应的所述控制系数,计算当前正常区间;
6、如果所述当前运行参数超出所述当前正常区间,判断所述自移动设备无法正常运行。
7、作为本发明的进一步改进,所述当前运行参数为电学参数,所述基础正常区间是所述自移动设备的运动方向平行于水平面时的电学参数,其中,所述电学参数为电压、或电流、或功率。
8、作为本发明的进一步改进,当所述当前运行角度对应所述自移动设备上坡时,所述当前正常区间的最大值大于所述基础正常区间的最大值。
9、作为本发明的进一步改进,所述当前运行参数为电压或电流,所述计算当前正常区间的步骤包括:
10、当所述当前运行角度位于上坡的第一角度范围内时,所述当前正常区间的最大值为所述当前运行角度和所述控制系数的乘积再加上所述基础正常区间的最大值;
11、当所述当前运行角度位于上坡的第二角度范围内时,所述当前正常区间的最大值为所述第一角度范围的最大值和所述控制系数的乘积再加上所述基础正常区间的最大值,其中,所述第一角度范围和所述第二角度范围内的值均为正值,所述第二角度范围的最小值大于等于所述第一角度范围的最大值。
12、作为本发明的进一步改进,当所述当前运行角度对应所述自移动设备下坡时,所述当前正常区间的最大值小于所述基础正常区间的最大值。
13、作为本发明的进一步改进,所述当前运行参数为电压或电流,所述计算当前正常区间的步骤包括:
14、当所述当前运行角度位于下坡的第三角度范围内时,所述当前正常区间的最大值为所述当前运行角度和所述控制系数的乘积再加上所述基础正常区间的最大值,其中,所述当前运行角度和所述控制系数的乘积的值为负值。
15、当所述当前运行角度位于下坡的第四角度范围内时,所述当前正常区间的最大值为所述第三角度范围的最小值和所述控制系数的乘积再加上所述基础正常区间的最大值,其中,所述第三角度范围和所述第四角度范围内的值均为负值,所述第四角度范围的最大值小于等于所述第三角度范围的最小值。
16、作为本发明的进一步改进,若所述电学参数为电压,所述电压为采样电阻两端的电压值,若所述电学参数为电流或功率,所述电流为电机的输出电流,所述功率为电机的输出功率。
17、作为本发明的进一步改进,所述当前运行参数和所述基础正常区间都是速度参数或都是加速度参数;
18、所述步骤如果所述当前运行参数超出所述当前正常区间,判断所述自移动设备无法正常运行还包括:
19、如果所述当前运行参数的速度或加速度超出所述当前正常区间,判断所述自移动设备无法正常运行。
20、作为本发明的进一步改进,所述当前运行角度对应所述自移动设备上坡时所述控制系数的值,不同于所述当前运行角度对应所述自移动设备下坡时所述控制系数的值。
21、为实现上述发明目的之一,本发明一实施例提供了一种自移动设备,包括:
22、存储模块,存储计算机程序;
23、处理模块,执行所述计算机程序时可实现上述的自移动设备的控制方法中的步骤。
24、与现有技术相比,本发明具有以下有益效果:应用该自移动设备的控制方法可以更准确地判断自移动设备的运行状态,无论自移动设备是在平地、上坡还是下坡,都能排除因自移动设备的重量引起的误判断的问题,使得相较于平地的运行,即使上坡时需要输出更高的能量、下坡时只需要输出更少的能量,也能设置合理的当前正常区间判断自移动设备是否能够正常的运行。
技术特征:
1.一种自移动设备的控制方法,其特征在于,所述控制方法包括如下步骤:
2.根据权利要求1所述的自移动设备的控制方法,其特征在于,所述当前运行参数为电学参数,所述基础正常区间是所述自移动设备的运动方向平行于水平面时的电学参数,其中,所述电学参数为电压、或电流、或功率。
3.根据权利要求2所述的自移动设备的控制方法,其特征在于,当所述当前运行角度对应所述自移动设备上坡时,所述当前正常区间的最大值大于所述基础正常区间的最大值。
4.根据权利要求3所述的自移动设备的控制方法,其特征在于,所述当前运行参数为电压或电流,所述计算当前正常区间的步骤包括:
5.根据权利要求2所述的自移动设备的控制方法,其特征在于,当所述当前运行角度对应所述自移动设备下坡时,所述当前正常区间的最大值小于所述基础正常区间的最大值。
6.根据权利要求5所述的自移动设备的控制方法,其特征在于,所述当前运行参数为电压或电流,所述计算当前正常区间的步骤包括:
7.根据权利要求2所述的自移动设备的控制方法,其特征在于,若所述电学参数为电压,所述电压为采样电阻两端的电压值,若所述电学参数为电流或功率,所述电流为电机的输出电流,所述功率为电机的输出功率。
8.根据权利要求1所述的自移动设备的控制方法,其特征在于,所述当前运行参数和所述基础正常区间都是速度参数或都是加速度参数;
9.根据权利要求1所述的自移动设备的控制方法,其特征在于,所述当前运行角度对应所述自移动设备上坡时所述控制系数的值,不同于所述当前运行角度对应所述自移动设备下坡时所述控制系数的值。
10.一种自移动设备,其特征在于,包括:
技术总结
本发明揭示了一种自移动设备、及自移动设备的控制方法,控制方法包括如下步骤:获取自移动设备的当前运行角度和当前运行参数;获取基础正常区间、以及与当前运行角度对应的控制系数;根据基础正常区间、当前运行角度及对应的控制系数,计算当前正常区间;如果当前运行参数超出当前正常区间,判断自移动设备无法正常运行。无论自移动设备是在平地、上坡还是下坡,都能排除因自移动设备的重量引起的误判断的问题,能设置合理的当前正常区间判断自移动设备是否能够正常的运行。
技术研发人员:袁立超,高向阳
受保护的技术使用者:苏州科瓴精密机械科技有限公司
技术研发日:
技术公布日:2024/10/31
网址:自移动设备、及自移动设备的控制方法与流程 https://www.yuejiaxmz.com/news/view/975178
相关内容
移动设备和移动设备控制方法与流程移动设备以及控制方法与流程
控制移动设备在线的方法及系统、移动设备、服务器与流程
移动设备及其控制方法与流程
移动设备的控制方法、移动设备的控制装置和移动系统.pdf
移动设备及其控制方法
移动设备及其控制方法.pdf
移动设备远程管理与控制
控制移动通信设备操作的移动通信设备和方法
苏州科瓴精密机械科技申请自移动设备控制方法及设备专利,解决自移动设备不能自动跨区域工作的问题
随便看看
最新动态分享
- 适合搭配的食材
- 食疗养生大全:67种天然食材搭配与食疗方,吃出健康好气色
- 哪些食材可以搭配食用 十对最佳食材搭配好吃又健康
- 壮阳补肾煲汤大全:中药配方与食材搭配全解析
- 广东鱼肚汤的家常做法大全|营养功效+食材搭配+5种经典汤谱(附详细步骤)
- 四季美容养颜豆浆配方大全|天然食材搭配+科学原理,喝出透亮肌
- 零失败家常小炒菜谱大全(附新手必学技巧+食材搭配指南)
- 补肾食谱大全:10种家常食疗方+食材清单,科学搭配提升肾动力
- 5种营养搭配!家常鸡汤快手做法大全(附不同做法+食材禁忌)
- 麻辣香锅食材菜单大全图
热点动态分享
- 144597
- 47703
- 44622
- 40392
- 40217
- 30604
- 25126
- 24985
- 21603
- 18299

