应急清洁方法、装置、设备及介质与流程
在家中设置燃气泄漏应急处置方案,熟悉操作流程。 #生活常识# #生活安全# #燃气安全防范#
本技术涉及到清洁机器人控制,具体而言,涉及到一种应急清洁方法、装置、设备及存储介质。
背景技术:
1、在当今社会,随着科技的迅速发展和人们生活水平的不断提高,自动化设备,尤其是清洁机器人,已经越来越多地被运用到日常生活和工作中,以提高清洁效率和改善环境卫生。现有的清洁机器人主要依赖于预设的清洁路径进行工作,它们能够在一定程度上减轻人力清洁的负担,但仍存在许多局限性和不足之处。
2、首先,现有清洁机器人在遇到突发性的清洁需求或异常事件时,如液体泄漏、散落的碎片等,往往缺乏有效的应对机制,这些机器人主要设计用于执行常规的清洁任务,而非特定情况下的应急清洁,因此在遇到非预期的环境变化时,无法及时识别和适应,从而影响清洁效果和环境安全。其次,现有的清洁机器人在处理异常事件时,往往缺乏足够的灵活性和智能化,无法准确判断异常事件的类型和严重程度,也难以根据具体情况选择最合适的清洁策略,限制了机器人在复杂环境下的应用范围,同时也增加了对人工干预的依赖,且现有清洁机器人在完成调整清洁点后,无法自动重新规划清洁路径,继续执行剩余的清洁任务,不仅降低了清洁效率,也导致清洁盲区的出现,影响整体的清洁质量。
3、因此,亟需一种新型的清洁方法解决上述问题。
技术实现思路
1、本技术的主要目的为提供一种应急清洁方法,旨在解决现有的清洁机器人无法解决突发的异常事件的技术问题。
2、为了实现上述发明目的,本技术提出一种应急清洁方法,应用于清洁机器人,包括:
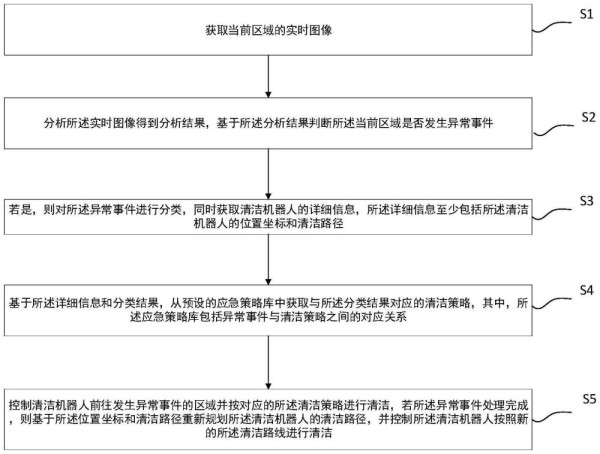
3、获取当前区域的实时图像;
4、分析所述实时图像得到分析结果,基于所述分析结果判断所述当前区域是否发生异常事件;
5、若是,则对所述异常事件进行分类,同时获取清洁机器人的详细信息,所述详细信息至少包括所述清洁机器人的位置坐标和清洁路径;
6、基于所述详细信息和分类结果,从预设的应急策略库中获取与所述分类结果对应的清洁策略,其中,所述应急策略库包括异常事件与清洁策略之间的对应关系;
7、控制清洁机器人前往发生异常事件的区域并按对应的所述清洁策略进行清洁,若所述异常事件处理完成,则基于所述位置坐标和清洁路径重新规划所述清洁机器人的清洁路径,并控制所述清洁机器人按照新的所述清洁路线进行清洁。
8、进一步地,所述分析所述实时图像得到分析结果,基于所述分析结果判断所述当前区域是否发生异常事件的步骤,包括:
9、基于图像分析算法分析所述实时图像得到分析结果,所述分析结果包括所述实时图像的相关特征;
10、将所述相关特征输入至预设的识别模型中,得到识别结果;
11、基于所述识别结果判断所述当前区域是否发生异常事件。
12、进一步地,所述分类结果包括漏液异常,所述应急策略库包括漏液清洁库,所述控制清洁机器人前往发生异常事件的区域并按对应的所述清洁策略进行清洁的步骤,包括:
13、当所述分类结果为所述漏液异常时,控制清洁机器人前往漏液区域,同时基于所述清洁机器人上的传感器分析漏液类型;
14、从所述漏液清洁库中获取与所述漏液的类型对应的清洁策略,其中,所述漏液清洁库包括漏液的性质与清洁策略之间的对应关系;
15、根据所述对应关系控制所述清洁机器人切换对应所述清洁策略的清洁工具。
16、进一步地,所述分类结果包括固体异常,所述应急策略库包括固体清洁库,所述控制清洁机器人前往发生异常事件的区域并按对应的所述清洁策略进行清洁的步骤,还包括:
17、当所述分类结果为所述固体异常时,基于控制清洁机器人前往固体区域,同时基于所述清洁机器人上的传感器分析固体的类型;
18、从所述固体清洁库中获取与所述固体的类型对应的清洁策略,其中,所述固体清洁库包括固体的类型与清洁策略之间的对应关系;
19、若所述固体清洁库没有所述固体的类型对应的清洁策略,则判定所述固体为危险物,并发出警示信息,同时发送警报信息至用户终端。
20、进一步地,所述基于所述位置坐标和清洁路径重新规划所述清洁机器人的清洁路径,并控制所述清洁机器人按照新的所述清洁路线进行清洁的步骤,包括:
21、获取未清洁区域和所述清洁机器人的当前位置,并基于所述当前位置与所述未清洁区域的距离确定清洁优先级;
22、根据确定结果,将未清扫区域分为多个清洁子任务,并为每个子任务分配相应的清洁顺序;
23、控制所述清洁机器人按照所述清洁顺序进行清洁。
24、进一步地,所述控制所述清洁机器人按照新的所述清洁路线进行清洁的步骤之后,还包括:
25、实时监测所述清洁机器人的移动路线;
26、判断所述清洁机器人的移动路线与所述新的所述清洁路线的偏差是否在预设阈值内;
27、若不在预设阈值内,则实时调整所述清洁机器人的移动路线,直至所述移动路线与所述清洁路线的偏差在预设阈值内。
28、进一步地,所述详细信息包括清洁机器人的电池电量,所述控制清洁机器人前往发生异常事件的区域并按对应的所述清洁策略进行清洁的步骤之后,还包括:
29、判断所述电池电量是否满足所述清洁机器人前往异常事件区域并完成清洁任务的最低要求;
30、若不满足,则控制清洁机器人前往最近的充电站进行充电;
31、当充电完成后,重新评估所述清洁机器人前往异常事件区域并完成清洁任务的能力,得到评估结果;
32、若所述评估结果符合要求,则继续执行前往异常事件区域并按对应的清洁策略进行清洁的步骤。
33、本技术还提出一种应急清洁装置,包括:
34、第一获取模块,用于获取当前区域的实时图像;
35、分析模块,用于分析所述实时图像得到分析结果,基于所述分析结果判断所述当前区域是否发生异常事件;
36、分类模块,用于若是,则对所述异常事件进行分类,同时获取清洁机器人的详细信息,所述详细信息至少包括所述清洁机器人的位置坐标和清洁路径;
37、第二获取模块,用于基于所述详细信息和分类结果,从预设的应急策略库中获取与所述分类结果对应的清洁策略,其中,所述应急策略库包括异常事件与清洁策略之间的对应关系;
38、控制模块,用于控制清洁机器人前往发生异常事件的区域并按对应的所述清洁策略进行清洁,若所述异常事件处理完成,则基于所述位置坐标和清洁路径重新规划所述清洁机器人的清洁路径,并控制所述清洁机器人按照新的所述清洁路线进行清洁。
39、本技术还提出一种计算机设备,其包括处理器、存储器及存储于所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述的方法。
40、本技术还提出一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述的方法。
41、有益效果:
42、本技术获取当前区域的实时图像,并分析这些图像以判断是否发生异常事件,能够实现对环境的实时监控和快速反应,使清洁机器人能够及时识别液体泄漏、散落的碎片等各种异常事件,从而在问题扩大前迅速介入,有效减少潜在的安全隐患和清洁负担,且本技术中的异常事件分类和获取清洁机器人详细信息(包括位置坐标和清洁路径)的步骤,进一步提高了应急清洁的针对性和效率,通过精确分类异常事件并结合机器人的具体位置信息,可以从预设的应急策略库中选取最合适的清洁策略,确保采取的措施既有效又高效,大幅提升了清洁机器人处理复杂情况的能力,然后控制清洁机器人前往异常事件发生区域并按照对应的清洁策略进行清洁,以及在异常事件处理完成后基于位置坐标和清洁路径重新规划清洁路线的机制,确保了清洁任务的连续性和完整性,最大限度地提高工作效率和清洁覆盖率。
43、综上所述,本技术提出的应急清洁方法提供了一种高效、智能且自适应的解决方案,以应对各种突发性清洁需求,提升了清洁机器人的性能和应用范围。
网址:应急清洁方法、装置、设备及介质与流程 https://www.yuejiaxmz.com/news/view/993420
相关内容
设备参数设置方法、设备及存储介质与流程设备控制方法、装置、电子设备及存储介质与流程
智能烹饪方法、装置、设备及介质与流程
衣物护理机及其控制方法、装置、设备及介质与流程
网络优化方法、装置、介质及电子设备与流程
电子设备的固件升级方法、装置、设备及存储介质与流程
SQL优化方法、装置、电子设备及存储介质与流程
客房快速清扫方法、装置、电子设备和介质与流程
出行提醒方法、装置、设备、存储介质及车辆与流程
出行路线推荐方法、装置、设备及存储介质与流程
随便看看
最新动态分享
- 适合搭配的食材
- 食疗养生大全:67种天然食材搭配与食疗方,吃出健康好气色
- 哪些食材可以搭配食用 十对最佳食材搭配好吃又健康
- 壮阳补肾煲汤大全:中药配方与食材搭配全解析
- 广东鱼肚汤的家常做法大全|营养功效+食材搭配+5种经典汤谱(附详细步骤)
- 四季美容养颜豆浆配方大全|天然食材搭配+科学原理,喝出透亮肌
- 零失败家常小炒菜谱大全(附新手必学技巧+食材搭配指南)
- 补肾食谱大全:10种家常食疗方+食材清单,科学搭配提升肾动力
- 5种营养搭配!家常鸡汤快手做法大全(附不同做法+食材禁忌)
- 麻辣香锅食材菜单大全图
热点动态分享
- 144597
- 47756
- 44623
- 40399
- 40278
- 30623
- 25129
- 25002
- 21605
- 18301

