自移动设备的控制方法及应用该方法的设备与流程
家庭自动化设备如智能灯泡的远程控制方法 #生活技巧# #居家生活技巧# #家庭护理技巧# #家庭自动化设备#
本技术涉及自移动机器领域,具体涉及一种自移动设备的控制方法及应用该方法的设备。
背景技术:
1、随着科技的发展,自移动设备的用途也越来越广泛,比如,自移动设备可自主完成修剪草地的工作,而无需人为控制。然而,自移动设备在沿边切割边界区域的草时,通常会以相同的边界距离移动,因此,边界区域的草被漏割的可能性较大。
技术实现思路
1、有鉴于此,本技术实施例提供了一种自移动设备的控制方法及应用该方法的设备。
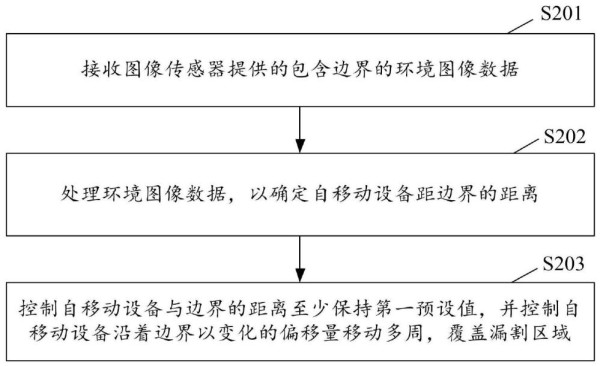
2、第一方面,本技术一实施例提供了一种自移动设备的控制方法,用于控制自移动设备在有边界的工作区域内移动,边界是草与非草的分界。该方法包括:接收图像传感器提供的包含边界的环境图像数据;处理环境图像数据,以确定自移动设备距边界的距离;控制自移动设备与边界的距离至少保持第一预设值,并控制自移动设备沿着边界以变化的偏移量移动多周,覆盖漏割区域;其中,漏割区域被定义为自移动设备的前进方向朝向边界时,控制自移动设备在距离边界达到第二预设值时转向,转向的位置与边界之间形成的区域,偏移量的取值范围基于漏割区域和第一预设值确定,至少两周的偏移量的取值不同。
3、结合第一方面,在第一方面的某些实现方式中,控制自移动设备在距离边界达到第二预设值时转向,包括:若在自移动设备的前进方向上检测到自移动设备距离边界达到第二预设值,则控制自移动设备逐渐减速、转向,朝背离边界的方向移动。
4、结合第一方面,在第一方面的某些实现方式中,控制自移动设备沿着边界以变化的偏移量移动多周,包括:接收用户输入的任务,任务包括周数或移动时间;响应于用户的输入,控制自移动设备平行于边界移动多周以遍历漏割区域,直至完成用户输入的任务。
5、结合第一方面,在第一方面的某些实现方式中,控制自移动设备沿着边界以变化的偏移量移动多周,包括:控制自移动设备在回归充电站模式下以变化的偏移量平行于边界移动;若自移动设备识别到前进方向上存在充电站,则控制自移动设备回归充电站。
6、结合第一方面,在第一方面的某些实现方式中,边界的任意位置安装有信号发射装置,自移动设备移动至信号发射装置的检测范围内时可接收到相关信号。控制自移动设备沿着边界以变化的偏移量移动多周,包括:控制自移动设备以变化的偏移量平行于边界移动,并在接收到相关信号时增加计数值;响应于计数值达到预设值,控制自移动设备结束平行于边界移动。
7、结合第一方面,在第一方面的某些实现方式中,移动多周,包括:每次自移动设备从充电站出站之后和/或回归充电站之前,自移动设备以一定的偏移量平行于边界移动一周,多次进站和/或回归充电站中至少有两次偏移量不同。
8、结合第一方面,在第一方面的某些实现方式中,移动多周,包括:每次自移动设备从充电站出站之后和/或回归充电站之前,自移动设备以一定的偏移量平行于边界移动多周,多周中至少有两周偏移量不同。
9、结合第一方面,在第一方面的某些实现方式中,每周的偏移量为固定值或在有界范围内变化,其中,有界范围基于漏割区域和第二预设值确定。
10、结合第一方面,在第一方面的某些实现方式中,自移动设备的控制方法还包括:若自移动设备在平行于边界移动时检测到距离边界的值在有界范围的端点值外,则调节驱动方向,使得自移动设备距离边界的值始终保持在有界范围内。
11、结合第一方面,在第一方面的某些实现方式中,处理环境图像数据,以确定自移动设备距边界的距离,包括:根据环境图像数据得到包含边界的第一图像;在自移动设备的前进方向朝向边界时,检测自移动设备距边界的距离;根据草的边界线在第一图像中的位置标定第一距离,第一距离与自移动设备距边界的距离对应。
12、结合第一方面,在第一方面的某些实现方式中,根据草的边界线在第一图像中的位置标定第一距离,包括:确定草的边界线与第一图像视野范围边缘的至少两个交点;将至少两个交点之间与第一图像视野范围下边缘的最短竖直距离作为第一距离。
13、结合第一方面,在第一方面的某些实现方式中,处理环境图像数据,以确定自移动设备距边界的距离,包括:根据环境图像数据得到包含边界的第二图像;计算第二图像的中心线包含草的边界线一侧区域中的草地面积,根据预设定的草地面积和自移动设备与边界的距离之间的函数关系,得到自移动设备距边界的距离。
14、结合第一方面,在第一方面的某些实现方式中,函数关系为,自移动设备在距离边界的预设范围内的目标位置点时,与第二图像中的草地面积的值之间的对应关系。
15、结合第一方面,在第一方面的某些实现方式中,处理环境图像数据,以确定自移动设备距边界的距离,包括:根据环境图像数据得到包含边界的第二图像;基于自移动设备的宽度方向的外边缘对应第二图像上的直线k,计算直线k距离草的边界线上多个点的水平距离的平均值,平均值对应自移动设备距边界的距离。
16、结合第一方面,在第一方面的某些实现方式中,处理环境图像数据,以确定自移动设备距边界的距离,包括:根据环境图像数据得到包含边界的第二图像;从第二图像视野下边缘的中心点,向草的边界线所在的方向依次检测像素块,直至检测到的像素块中的草地面积占比小于或等于预定值,则停止检测像素块;统计所检测到的像素块的数量;根据数量和像素块的面积,计算中心点距离草的边界线与第二图像的视野下方的交点间的长度,长度对应自移动设备距边界的距离,其中,每一像素块为包含多个像素点的四边形区域。
17、结合第一方面,在第一方面的某些实现方式中,向草的边界线所在位置的方向依次检测像素块,包括:若像素块与第二图像的视野侧边缘重合,且仍未检测到草地面积占比小于或等于预定值的像素块,则继续沿第二图像的视野侧边缘向上检测像素块,直至检测到草地面积占比小于或等于预定值的像素块,则停止检测像素块。
18、第二方面,本技术一实施例提供了一种自移动设备,用于在有边界的工作区域内移动,边界是草与非草的分界。自移动设备包括:主体;移动组件,带动自移动设备移动,包括主动轮和从动轮;图像传感器,设置在主体上,视场范围朝主动轮的前进方向上延伸,为自移动设备提供视场范围内的数据;控制器,接收并处理视场范围内的数据,并根据处理结果控制自移动设备的移动速度及移动方向;控制器被配置为执行一种自移动设备的控制方法,该方法包括:接收图像传感器提供的包含边界的环境图像数据;处理环境图像数据,以确定自移动设备距边界的距离;控制自移动设备与边界的距离至少保持第一预设值,并控制自移动设备沿着边界以变化的偏移量移动多周,覆盖漏割区域;其中,漏割区域被定义为自移动设备的前进方向朝向边界时,控制自移动设备在距离边界达到第二预设值时转向,转向的位置与边界之间形成的区域,偏移量的取值范围基于漏割区域和第一预设值确定,至少两周的偏移量的取值不同。
19、第三方面,本技术一实施例提供了一种自移动设备,用于在有边界的工作区域内移动,边界是草与非草的分界。自移动设备包括:主体;移动组件,带动自移动设备移动,包括主动轮和从动轮;一个或多个传感器,设置在主体上,用于提供自移动设备在工作区域内的位姿数据;控制器,接收并处理位姿数据,并根据处理结果控制自移动设备的移动速度及移动方向;控制器被配置为执行一种自移动设备的控制方法,方法包括:接收传感器提供的自移动设备在工作区域内的位姿数据;处理位姿数据,以确定自移动设备距边界的距离;控制自移动设备与边界的距离至少保持第一预设值,并控制自移动设备沿着边界以变化的偏移量移动多周,覆盖漏割区域;其中,漏割区域被定义为自移动设备的前进方向朝向边界时,控制自移动设备在距离边界达到第二预设值时转向,转向的位置与边界之间形成的区域,偏移量的取值范围基于漏割区域和第一预设值确定,至少两周的偏移量的取值不同。
20、第四方面,本技术一实施例提供了一种计算机可读存储介质,该计算机可读存储介质存储有计算机程序,该计算机程序用于执行第一方面所提及的方法。
21、第五方面,本技术一实施例提供了一种电子设备,该电子设备包括:处理器;用于存储处理器可执行指令的存储器;该处理器用于执行第一方面所提及的方法。
22、本技术实施例提供的自移动设备的控制方法具有如下有益效果。
23、当自移动设备在有边界的工作区域内作业时,当其与边界的距离达到第二预设值时会进行转向,一方面避免了自移动设备超出工作区域的边界,另一方面避免了自移动设备与边界处的障碍物(例如,墙体)发生碰撞。此外,自移动设备与边界的距离至少保持第一预设值,保证了漏割区域内草的切割完整度。自移动设备沿着边界以变化的偏移量移动多周,使漏割区域被切割的更完全,同时避免了多次以相同的偏移量移动时,草地出现压痕,影响草地美观。
网址:自移动设备的控制方法及应用该方法的设备与流程 https://www.yuejiaxmz.com/news/view/975187
相关内容
自移动设备、及自移动设备的控制方法与流程移动设备和移动设备控制方法与流程
移动设备以及控制方法与流程
控制移动设备在线的方法及系统、移动设备、服务器与流程
移动设备及其控制方法与流程
移动设备及其控制方法
移动设备及其控制方法.pdf
移动设备的控制方法、移动设备的控制装置和移动系统.pdf
用于控制外部设备的移动设备和方法以及外部设备.pdf
家用设备的控制方法、装置以及系统与流程
随便看看
最新动态分享
- 适合搭配的食材
- 食疗养生大全:67种天然食材搭配与食疗方,吃出健康好气色
- 哪些食材可以搭配食用 十对最佳食材搭配好吃又健康
- 壮阳补肾煲汤大全:中药配方与食材搭配全解析
- 广东鱼肚汤的家常做法大全|营养功效+食材搭配+5种经典汤谱(附详细步骤)
- 四季美容养颜豆浆配方大全|天然食材搭配+科学原理,喝出透亮肌
- 零失败家常小炒菜谱大全(附新手必学技巧+食材搭配指南)
- 补肾食谱大全:10种家常食疗方+食材清单,科学搭配提升肾动力
- 5种营养搭配!家常鸡汤快手做法大全(附不同做法+食材禁忌)
- 麻辣香锅食材菜单大全图
热点动态分享
- 144597
- 47691
- 44622
- 40391
- 40205
- 30604
- 25125
- 24979
- 21599
- 18296

